11.การวางรูปแบบระบบขับเคลื่อนและเลือกเกียร์สำหรับสายพานลำเลียง ( Drive System and Gear Reducer Selection)
1.Drive Transmission System ระบบขับเคลื่อนและส่งกำลังสายพานลำเลียง
คอนเวเยอร์ไกด์ขอเรียนว่า Content ที่ปรากฏอยู่ในบทความนี้เรานำเสนอหรือไฮไลท์ (Highlight) เฉพาะเรื่องที่เป็นหัวข้อสำคัญๆ ส่วนรายละเอียดลึกๆ เราไม่บังอาจเพราะเราไม่ได้เก่งพอที่จะนำมาแชร์อย่างละเอียดได้ทุกเรื่อง ที่นำเสนอ แค่ให้เป็น Road Map ให้ผู้อ่านสามารถไปศึกษาด้วยตัวเองได้ง่ายขึ้น ทางลัดที่ขอแนะนำคือติดต่อผู้ผลิตอุปกรณ์เหล่านั้นให้มาเล่าเรื่องให้ฟัง เพราะข้อมูลการเลือกอุปกรณ์แต่ละอย่างมันแยกย่อยไปอีกเยอะแยะมากมาย ซึ่งเราก็ไม่สามารถรู้ได้อย่างครบถ้วนเหมือนกัน

คอนเวเยอร์ไกด์ไปดูหน้างานนำประสบการณ์ดีๆมาแบ่งปัน (ภาพ โรงไฟฟ้าถ่านหิน)
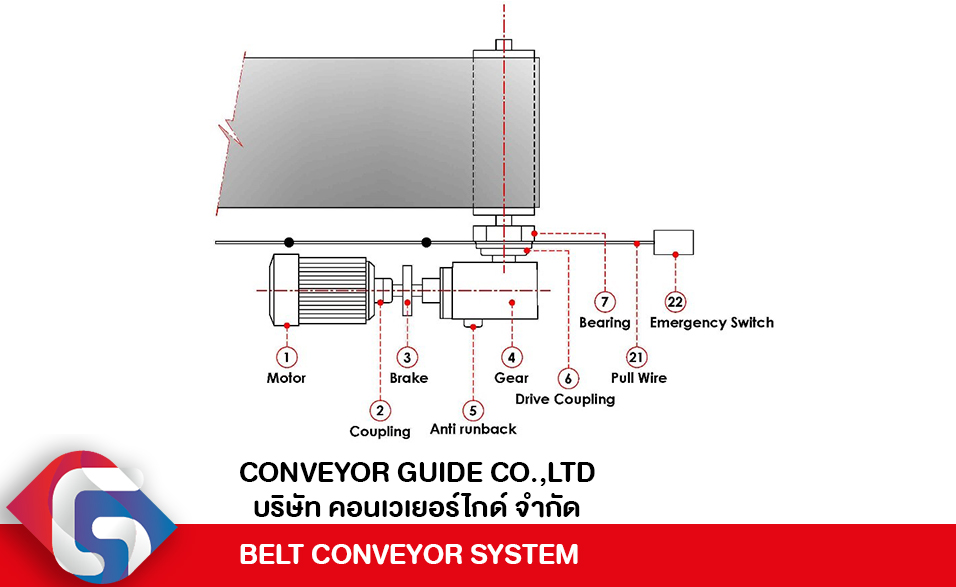
ก่อนที่จะไปเลือกมอเตอร์และเกียร์ เราต้องเข้าใจก่อนว่ามอเตอร์และเกียร์เป็นเป็นส่วนหนึ่งของระบบส่งกำลัง (Transmission System) มอเตอร์ไม่เหมาะสมที่จะฉุดสายพานให้เคลื่อนที่ได้ด้วยตัวของมันเองโดยลำพัง ขณะที่เกียร์ก็ไม่สามารถจะทำงานได้ถ้าไม่มีต้นกำลังจากมอเตอร์มาหมุน หน้าที่ของมอเตอร์คือเป็นต้นกำลังที่จะสร้างแรงบิด(Torque) ให้พูเล่ (Pulley) ไปฉุดสายพานให้เคลื่อนที่ ส่วนอุปกรณ์จากมอเตอร์ถึงพูเล่ ประกอบด้วยอุปกรณ์ส่งกำลังหลายส่วนรวมกันเรียกว่าระบบขับเคลื่อน(Drive System) ประกอบด้วย มอเตอร์ เกียร์ ,Coupling , Hold Back(Back Stop) และ Brake นำมาต่อเชื่อมกันเป็นระบบเพื่อให้สายพานจะเคลื่อนที่ได้ด้วยความปลอดภัย
ส่วนประกอบหลักของ Drive System ระบบสายพานลำเลียง
อุปกรณ์ของ Drive System ของระบบสายพานลำเลียง
ส่วนประกอบของ Drive System ของระบบสายพานลำเลียงขนาดใหญ่
เนื่องจากมอเตอร์มีรอบ (rpm) การทำงานที่สูงมากขณะที่รอบ(rpm) การทำงานของสายพานลำเลียงจะมีต่ำกว่า ดังนั้นจำเป็นจะต้องมีตัวช่วยเพื่อลดรอบ(rpm)ของมอเตอร์ให้ต่ำลงเหมาะสมกับความเร็วของสายพานลำเลียง สิ่งนั้นคือใช้ Gear Reducer จากนั้นต้องมีอุปกรณ์ที่ช่วยในการส่งกำลัง (Transmission Coupling) เชื่อมต่อไปถึง Drive Pulleyได้อย่างนุ่มนวล
ถ้าโปรไฟล์ (Profile) ของสายพานแนวเอียงขึ้น (Incline) ต้องติดตั้ง Holdback หรือ Back Stop เพื่อป้องกันไม่ให้สายพานลำเลียงต้องไหลลงในกรณีที่เกิดไฟฟ้าดับหรืออุบัติเหตุทำให้สายพานหยุดโดยกะทันหัน

สายพานมีแนวเอียงขึ้น (Incline) ต้องติดตั้ง Back stop
หรือในกรณีที่โปรไฟล์ (Profile) ของคอนเวเยอร์เป็นแบบเอียงลง(Decline) จำเป็นจะต้องติดระบบชะลอการเคลื่อนที่หรือ Brake เพื่อให้สายพานลำเลียงสามารถลดความเร็วและหยุดได้อย่างเหมาะสมไม่เกิดอันตราย
สายพานมีแนวเอียงลง (Decline) ต้องติดตั้ง Brake ช่วยหยุดสายพาน
เมื่อเลือกรูปแบบการวางตำแหน่งของ Drive component เรียบร้อยแล้ว ขั้นตอนการเลือก Gear Reducer ควรศึกษากับ แคตตาล็อกของผู้ผลิต Gear Reducer ยี่ห้อนั้น ๆ เนื่องจากมีปัจจัยหลายอย่างที่ต้องพิจารณาเช่น รูปแบบการเชื่อมต่อของ Gear Reducer กับมอเตอร์ ความสามารถ(Performance) ระยะเวลารับประกัน วัสดุที่ทำเกียร์ น้ำหนัก ความเร็ว , Gear Ratio , Service Factor และคุณสมบัติของ Gear Reducer ด้านอื่นอีกหลายอย่างต้องนำมาพิจารณาร่วมด้วย
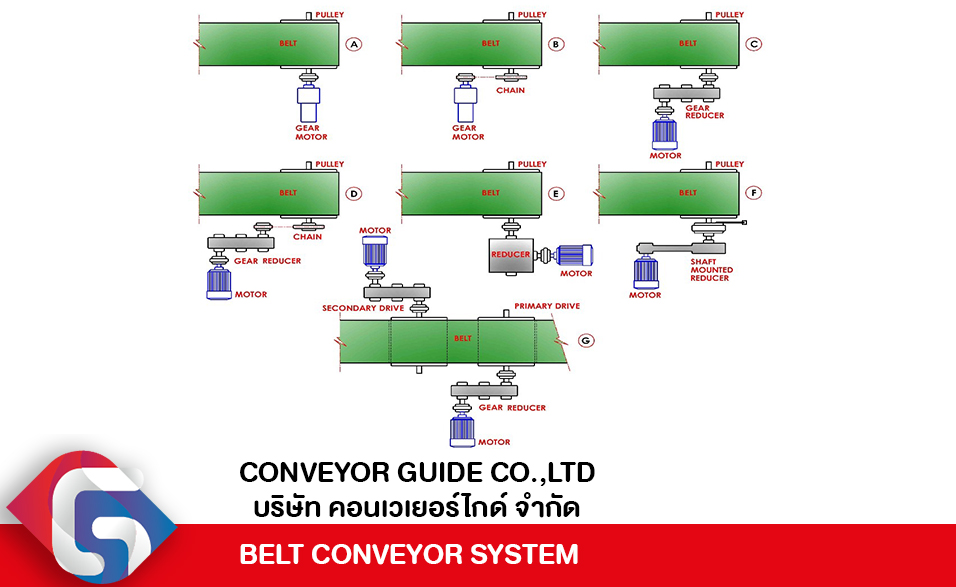
2.การวางตำแหน่ง Drive Components
อุปกรณ์ของระบบขับเคลื่อนของสายพานลำเลียงส่วนมากจะติดตั้งอยู่กับที่(Fix) น้ำหนักของเกียร์จึงไม่เป็นอุปสรรคในการติดตั้ง ดังนั้นจึงเป็นการไม่ยากที่จะเลือกรุ่นเกียร์ให้เหมาะสมกับสภาพพื้นที่การติดตั้งได้ แต่ถ้าเป็นโมบายคอนเวเยอร์ (Mobile Conveyor) ต้องพิจารณาน้ำหนักและการเคลื่อนที่ของโมบายคอนเวเยอร์ว่ามีผลกระทบกับความสะดวกและความปลอดภัยต่อการใช้งานอย่างไร Lay Out ข้างล่างนี้แสดงตัวอย่างการวางตำแหน่งของ Drive System รูปแบบต่างๆ คอนเวเยอร์ไกด์ขอเสนอให้ผู้อ่านนำไปประยุกต์ใช้กับระบบสายพานลำเลียงของท่านตามความเหมาะสม
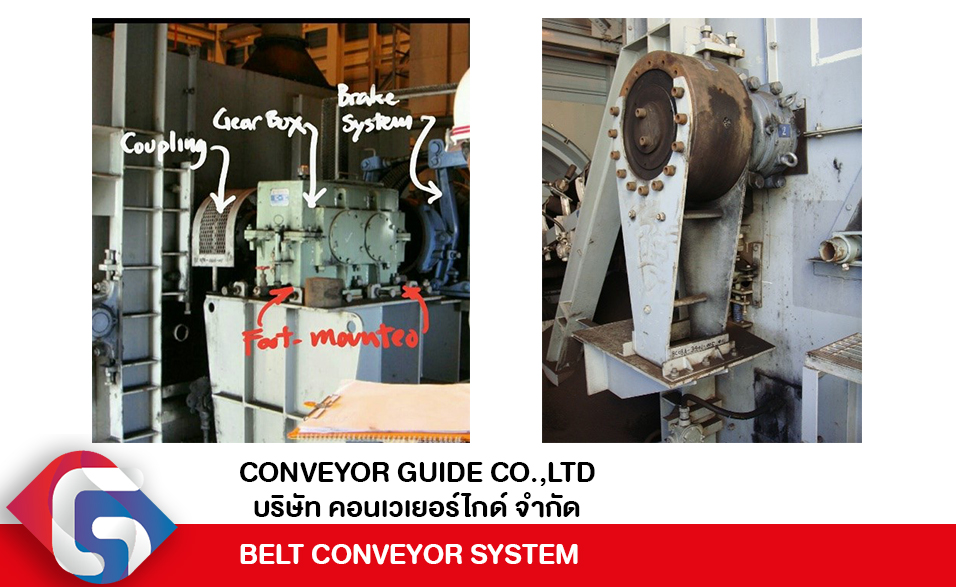
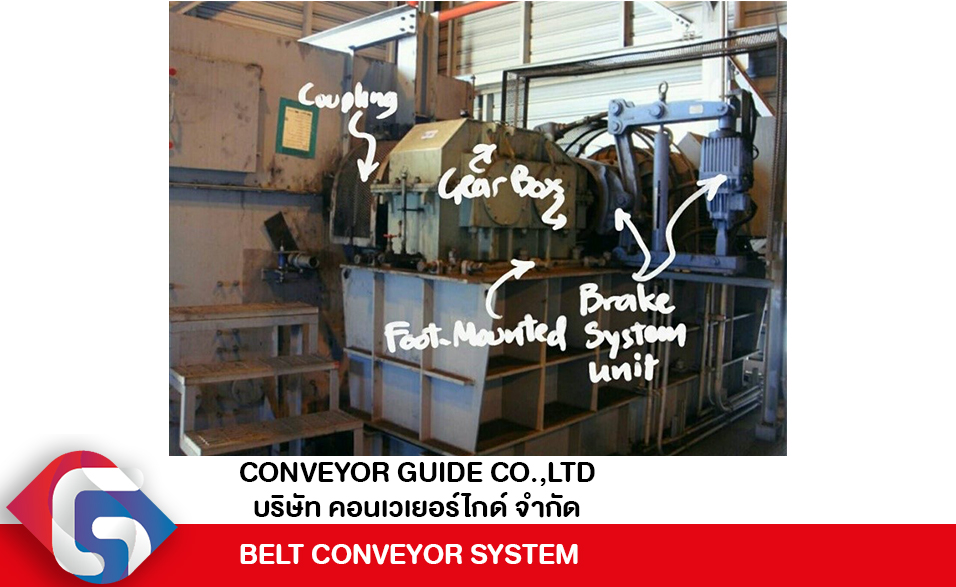
2.1.Foot Mounted Worm Gear Box
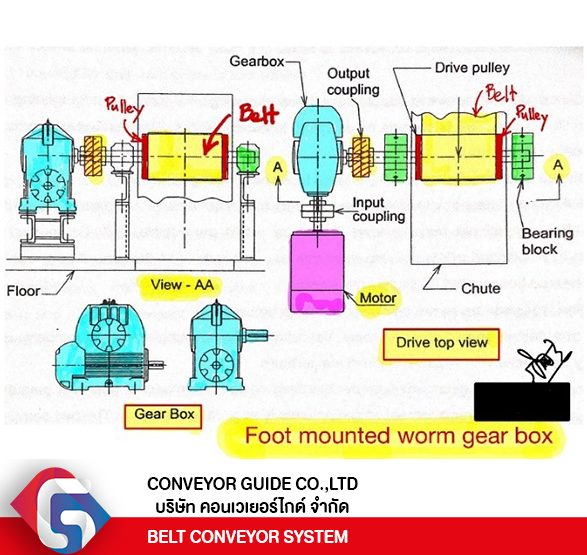
Foot Mounted Worm Gear Box

เป็น Drive Arrangement แบบราคาประหยัดสำหรับใช้งาน Conveyor ทั่วไปที่มีกำลังขับ(กิโลวัตต์) ต่ำ
• ราคาถูก
• Input และ Output Shaft ตั้งฉากกัน ดังนั้นจึงต้องมีพื้นที่ที่มากพอที่จะติดตั้งได้
• Transmission Efficiency ต่ำประมาณ 80% ถึง 90%
• เกียร์เป็น Shelf Locking อยู่ในตัวดังนั้นจึงไม่ต้องใช้ Back Stop ถ้าใช้ในไลน์คอนเวเยอร์ที่สั้นๆ
• อุปกรณ์ส่งกำลังสามารถใช้ Fluid Coupling หรือ Flexible Coupling ได้
2.2.Shaft Mounted Worm Gear Box

Shaft Mounted Worm Gear Box Arrangement
มอเตอร์และเกียร์เชื่อมกันด้วย Flexible Coupling เพลาของ Drive Pulley เสียบเข้ากับรู (Output Hollow Shaft ) เกียร์ได้โดยตรง Drive Unit แขวนอยู่บนเพลาของ Drive Pulley น้ำหนักของ Drive Unit รองรับโดยเพลาของ Drive Pulley และทอร์คอาร์ม (Torque Arm) ซึ่งยึดระหว่างโครงสร้างกับมอเตอร์ ดังนั้นต้องมีความระมัดระวังอย่างสูงในการตั้ง Alignment เพื่อให้เพลาของ Drive Unit และ Drive Pulley ให้ตรงได้ฉากกันหากเพลาเกิดเยื้องศูนย์แรงที่เกิดจากการเยื้องศูนย์ทำให้อุปกรณ์เสียหายได้ง่าย
• ไม่ต้องมี Output Shaft
• ใช้พื้นที่ในการติดตั้งน้อย(เพราะไม่มี Output Shaft)
• ใช้พื้นที่ในการติดตั้งน้อย(เพราะไม่มี Output Shaft)
• ตัดความกังวลเกี่ยวกับการ Alignment ของ Output Shaft กับ Drive Pulley
• ต้องเพิ่มขนาดของ Shaft และลูกปืน (Bearing) ของ Drive Pulley (ในบางกรณี)
• เกียร์เป็น Shelf Locking อยู่ในตัวดังนั้นจึงไม่ต้องใช้ Back Stop ถ้าใช้ในไลน์คอนเวเยอร์ที่สั้นๆ
• อุปกรณ์ส่งกำลังสามารถใช้ Fluid Coupling หรือ Brake ได้ๆ
2.3.Horizontal Foot Mounted Worm Gear Motor
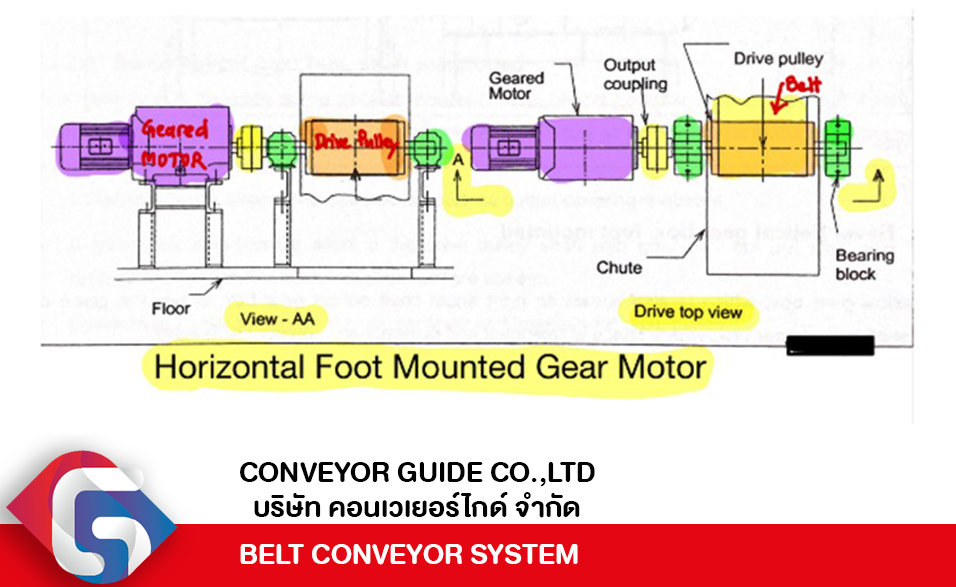
Horizontal Foot Mounted Worm Gear Motor
การติดตั้งรูปแบบนี้ใช้กับคอนเวเยอร์ที่มีกำลังขับขนาดเล็กถึงขนาดปานกลาง เกียร์บล็อกและมอเตอร์จะสร้างรวมเป็นชุดเดียวกัน (Single Compact Unit) ไม่มี Input Coupling ระหว่างเกียร์บล็อกและมอเตอร์
• ต้องการพื้นที่ในการติดตั้งด้านขวางกับทิศทางการเคลื่อนที่ของไลน์คอนเวเยอร์ค่อนข้างมาก
• Efficiency ค่อนข้างสูงถ้าเป็น Helical Gear
• สามารถติดตั้งเบรก (Brake) อยู่ภายใน Gear Unit ได้
• เกียร์ไม่มี Self-Locking-ดังนั้นในสายพานเอียงขึ้น (Incline) ต้องติดตั้ง Back Stop (ถ้าจำเป็น)
2.4.Parallel Shaft Helical Gear Box
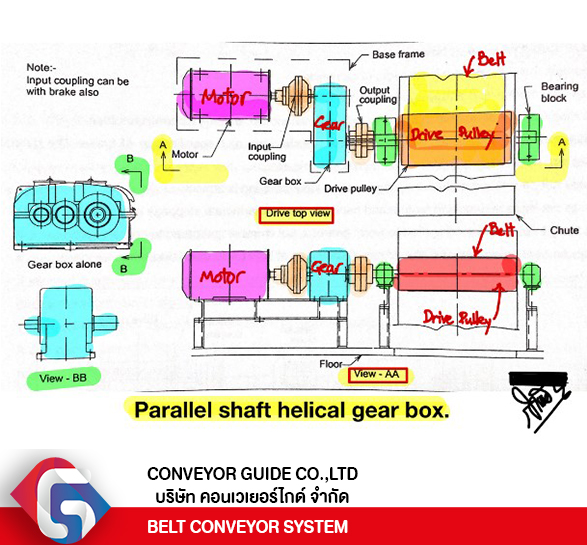
Parallel Shaft Helical Gear Box
การติดตั้งรูปแบบนี้เป็นตัวเลือกแรกสำหรับสายพานลำเลียงขนาดใหญ่ (Heavy Duty Conveyor)
• Transmission Efficiency ในการถ่ายกำลังค่อนข้างสูง
• สามารถติดตั้ง Hold Back อยู่ภายใน Gear Unit ได้
• สามารถใช้ Coupling ระหว่างมอเตอร์และเกียร์บล็อกประเภทใดก็ได้
• สามารถติดตั้ง Brake ภายนอก ขนาดเล็ก-ใหญ่ตามต้องการ
• Gear ไม่มี Self-Locking ดังนั้นการหยุด Conveyor จะเป็นแบบค่อยๆลดความเร็ว (Gradual Stop)ตามการคำนวณ Braking Force และ Safety Factor
• เกียร์บล็อกประเภท Horizontal Split สามารถเปิดฝาบน ทำการตรวจสอบได้ง่าย โดยไม่รบกวนการทำงานของระบบอื่น
• ต้องการพื้นที่สำหรับติดตั้งมากเพราะว่าแกนมอเตอร์ติดตั้งในแนวขนานกับแกนของ Drive Pulley
• มีราคาค่อนข้างแพงเมื่อเปรียบเทียบกับเกียร์บล็อกประเภทอื่น (ยกเว้น Bevel Helical Gear)
2.5.Bevel Helical Gear Box-Foot Mounted
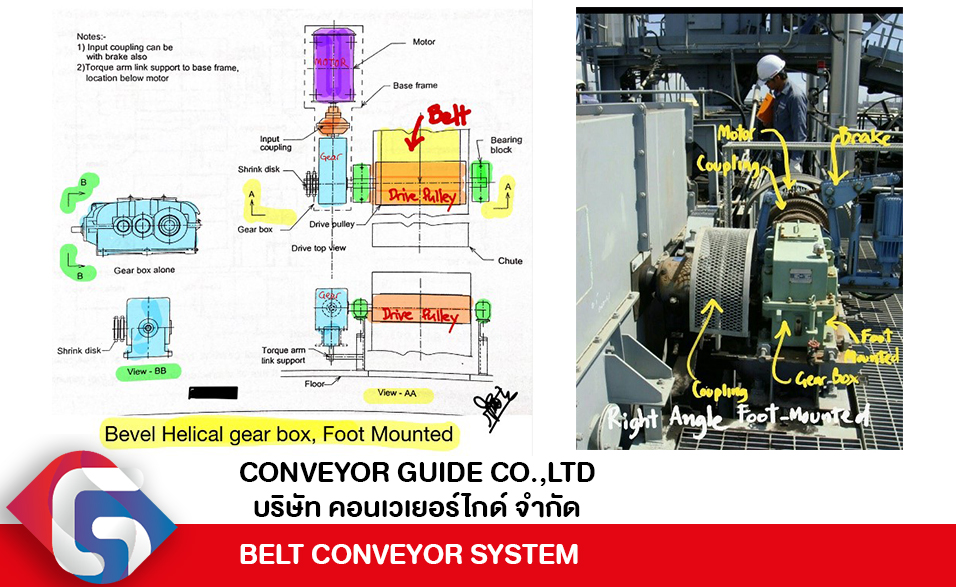
Bevel Helical Gear Box-Foot Mounted
การติดตั้งรูปแบบนี้เพลาของเกียร์และเพลาของ Drive Pulley อยู่ในแนวตั้งฉากกัน ทำมาใช้ทดแทนแบบเพลาขนานกัน (Parallel Shaft Helical Gear Box) ซึ่งกินพื้นที่การติดตั้งมาก คุณสมบัติทั่วไปก็จะเหมือน Parallel Shaft Helical Gear Box
• Transmission Efficiency ในการถ่ายกำลังค่อนข้างสูง
• สามารถติดตั้ง Hold Back อยู่ภายใน Gear Unit ได้
• สามารถใช้ Coupling ระหว่างมอเตอร์และเกียร์บล็อกประเภทใดก็ได้
• สามารถติดตั้ง Brake ภายนอก ขนาดเล็ก-ใหญ่ตามต้องการ
• Gear ไม่มี Self-Locking การหยุด Conveyor จะเป็นแบบค่อยๆหยุด (Gradual Stop)ตามการคำนวณ Braking Force และ Safety Factor
• เกียร์บล็อกประเภทHorizontal Split สามารถเปิดฝาบน ทำการตรวจสอบได้ง่าย โดยไม่รบกวนการทำงานของระบบอื่น
ข้อแตกต่าง Bevel Helical Gear Box-Foot Mounted กับ Parallel Shaft Helical Gear Box ดังนี้คือ
• Bevel Helical Gear Box-Foot Mounted ราคาแพงกว่าแบบ Parallel Shaft Helical Gear Box
• เนื่องจากชุด Drive Unit Bevel Helical Gear Box-Foot Mounted มีขนาด Compact จึงทำให้พื้นที่ของTransfer House มีขนาดเล็กลงส่งผลให้ประหยัดค่าก่อสร้างในภาพรวม
• เกียร์บล็อก Bevel Helical Gear Box-Foot Mounted แบบนี้เหมาะสำหรับระบบสายพานลำเลียงที่ใช้งานหนัก (Heavy Duty)ม
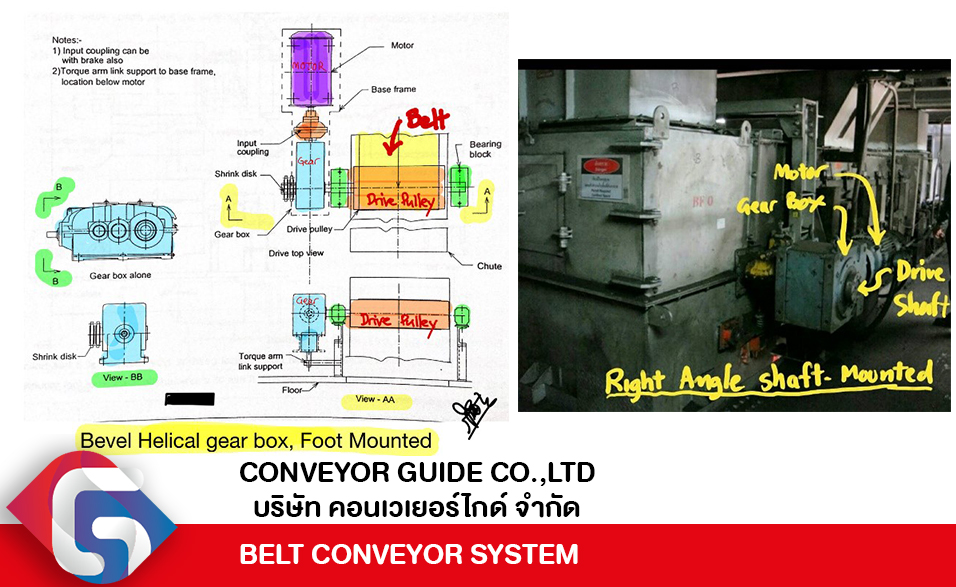
2.6.Bevel Helical Gear Box Shaft Mounted
การติดตั้งเกียร์บล็อกแบบนี้จะเหมือนกับมีคุณสมบัติเหมือนกับชุด Bevel Helical Gear Box-Foot Mounted
• Transmission Efficiency ในการถ่ายกำลังค่อนข้างสูง
• สามารถติดตั้ง Hold Back อยู่ภายใน Unit ได้
• สามารถใช้ Coupling ระหว่างมอเตอร์และเกียร์บล็อกประเภทใดก็ได้
• สามารถติดตั้งBrake ภายนอก ขนาดเล็ก-ใหญ่ตามต้องการ
• ไม่มี Self-Locking การหยุดจะเป็นแบบค่อยๆ(Gradual Stop)หยุดตามการคำนวณ Braking Force และ Safety Factor
• เกียร์บล็อกประเภท Horizontal Split สามารถเปิดฝาบน ทำการตรวจสอบได้ง่าย โดยไม่รบกวนการทำงานของระบบอื่น
แต่มีข้อแตกต่างดังนี้คือ
• Output เกียร์เป็น Hollow Shaft Output
• เมื่อไม่มี Shaft Output ทำให้ Drive Unit มีขนาดเล็ก ดังนั้นจึงต้องการพื้นที่ติดตั้งน้อย ส่งผลให้ Transfer House มีขนาดเล็กทำให้ประหยัดค่าก่อสร้างโดยรวม
• ไม่ต้องกังวลเรื่อง Alignment ของเพลา Drive Pulley และเกียร์บล็อก Gear Box Output (ไม่มี)
• เพลาและ Bearing ของ Drive Pulley ใหญ่ขึ้น(ในบางกรณี)
2.7.โซ่ส่งกำลัง(Roller Chain Drive)
ใช้สำหรับสายพานลำเลียงที่มีกำลังขับขนาดเล็ก
• ข้อดีโซ่ส่งกำลัง(Roller Chain Drive) มีความสะดวกในการติดตั้ง สามารถติดตั้งได้หลายรูปแบบ ไม่ว่าจะเป็นตำแหน่ง ด้านบน ด้านล่าง หรือ ด้านข้าง ของ Drive Pulley )
ข้อด้อยประกอบด้วย
• เพิ่มชิ้นส่วน Chain Drive ในระบบที่ต้องมีการบำรุงรักษา
• หาก ต้องเปลี่ยน Chain Drive ที่เสียหาย Hold Back ที่ติดตั้งใน Gear Box จะทำหน้าที่ไม่ได้ ไม่สามารถที่จะป้องกันให้สายพานลำเลียงไหลลงข้างล่างได้ (กรณีที่สายพานลำเลียงติดตั้งในแนวเอียงลง)
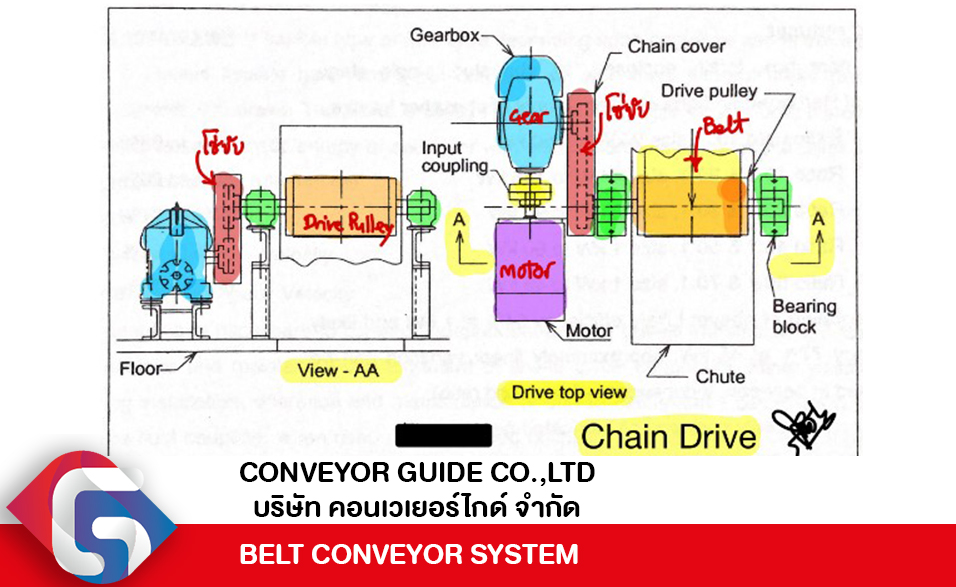

โซ่ส่งกำลัง(Roller Chain Drive)
คุณสมบัติทั่วไปควรรู้ก่อนเลือกโซ่ส่งกำลัง
• โซ่ส่งกำลัง(Roller Chain) ทำงานร่วมกันกับ เฟือง (Sprocket) ที่มาด้วยกันชุดเป็น Standard Unit
• การความสามารถในการส่งกำลัง (Power Transmission Efficiency )ของโซ่ส่งกำลัง(Roller Chain)ขึ้นอยู่กับขนาด Pitch และจำนวนฟันของเฟือง (Sprocket) เมื่อ Pitch ของโซ่มีมากขึ้นและจำนวนจำนวนฟัน(Teeth)ของเฟือง (Sprocket) มีมากขึ้นความสามารถในการส่งกำลังก็จะมากขึ้น
• สามารถเลือกใช้โซ่ส่งกำลัง(Roller Chain) 1 แถว 2 แถวหรือ 3 แถวแล้วแต่ความสามารถในการรับแรงของโซ่ส่งกำลัง(Roller Chain) นั้นๆ และขึ้นอยู่กับขนาดพื้นที่และความสะดวกของพื้นที่ในการติดตั้งโซ่ส่งกำลัง(Roller Chain)
• ชุดโซ่ส่งกำลัง(Roller Chain Set) จะต้องอยู่ในภาชนะที่ปิด (Enclose Container)ที่มีระบบการหล่อลื่นที่ดีและมีความปลอดภัยสูง
• ชุดโซ่ส่งกำลัง(Roller Chain Set) ต้องการระยะ Minimum Center to Center ระหว่างเฟืองขับและเฟืองตาม เพื่อให้มี”Wrap Angle เพียงพอที่จะทำให้โซ่สามารถส่งแรงได้อย่างมีประสิทธิภาพ
• โซ่ส่งกำลัง(Roller Chain) และชุดเฟือง(Sprocket) สามารถเลือกได้จากตารางของผู้ผลิต
2.8. สายพานส่งกำลังแบบตัววี( V-Belt Drive)
ใช้สำหรับสายพานลำเลียงที่มีกำลังขับขนาดเล็กราคาถูก การวาง Lay Out ก็เช่นเดียวกับโซ่ส่งกำลัง (Roller Chain Drive) ใช้ Wire Mess Guard ป้องกัน V-Belt Drive เพื่อความปลอดภัย

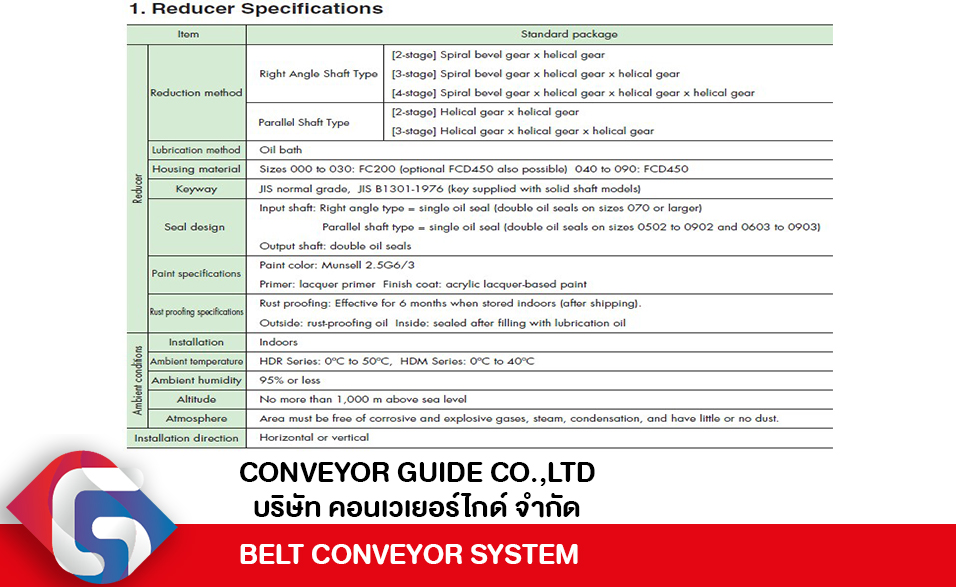
3.ตัวอย่าง Gear Reducer specification (Helical Drive)
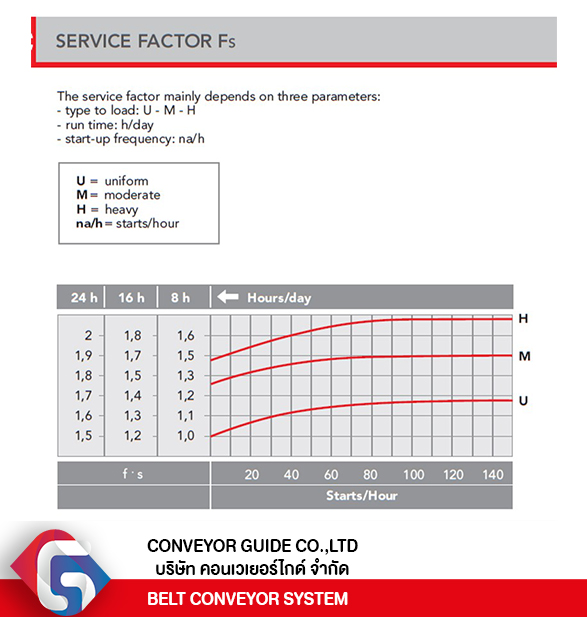
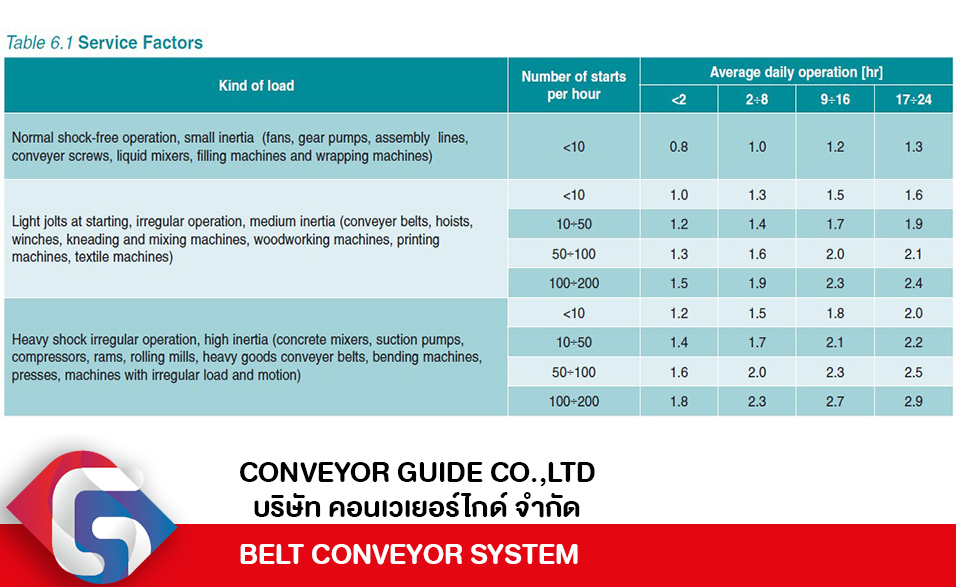
4. Gear Service factors
การเลือก Service Factor ของเกียร์ก็เช่นเดียวกับการเลือก Service Factor ของมอเตอร์ ปัจจัยหลักที่นำมาพิจารณา มี 3 ตัวแปรคือ
1.ลักษณะการกระชาก(Shock)ของโหลดระหว่างทำงานว่าเป็นแบบสม่ำเสมอ(Uniform Shock)หรือกระชากแรงปานกลาง(Modulate Shock)หรือกระชากอย่างรุนแรง(Heavy Shock)
2.ชั่วโมงการทำงานมากหรือน้อยต่อวัน
3.การเปิด-ปิด(Strat-Stop)มีบ่อยแค่ไหนต่อชั่วโมง