
introduction 10
10.Drive Arrangement สำหรับระบบสายพานลำเลียง
1.ภาพรวมการคล้องสายพาน(Drive Arrangement)

คอนเวเยอร์ไกด์ไปดูหน้างานนำเรื่องราวดีๆมาแบ่งปัน
ระบบขับเคลื่อนสายพานลำเลียงประกอบด้วยอุปกรณ์หลายอย่างที่ทำงานร่วมกันทำให้สายพานเคลื่อนที่ตั้งแต่การเริ่มสตาร์ท (Start) วิ่ง Full Load จนถึงหยุด(Stop) สิ่งที่ต้องพิจารณาก่อนออกแบบคือการจัดวางตำแหน่งของ Pulleys หรือเรียกให้เข้าใจง่ายๆว่าการมีรูปแบบ (Lay Out) การคล้องสายพาน (Drive Arrangement) อย่างไร Conveyor Guide รวบได้รวมรูปแบบการคล้องสายพาน (Drive Arrangement) ส่วนหนึ่งจากตำราหลายสำนักเพื่อเป็นไอเดียให้ผุ้อ่านสามารถนำประยุกต์ไปใช้งานต่อไปแสดงในรูปข้างล่างนี้
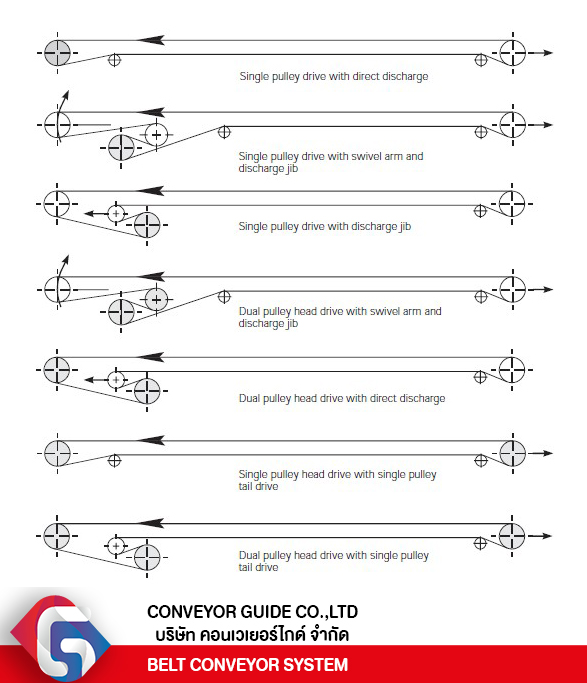
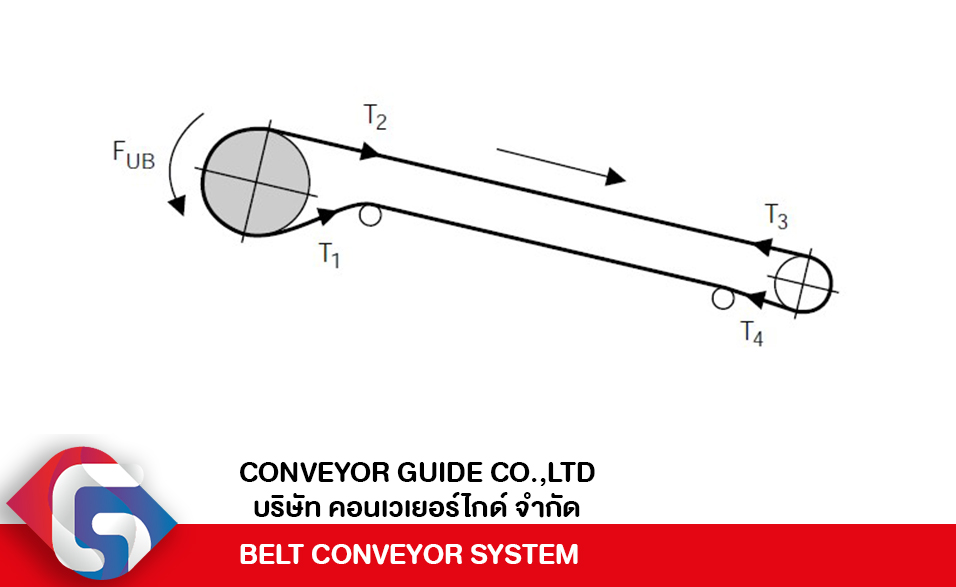
รูปแบบการคล้องสายพาน (Drive Arrangement-Ref:Dunlop)
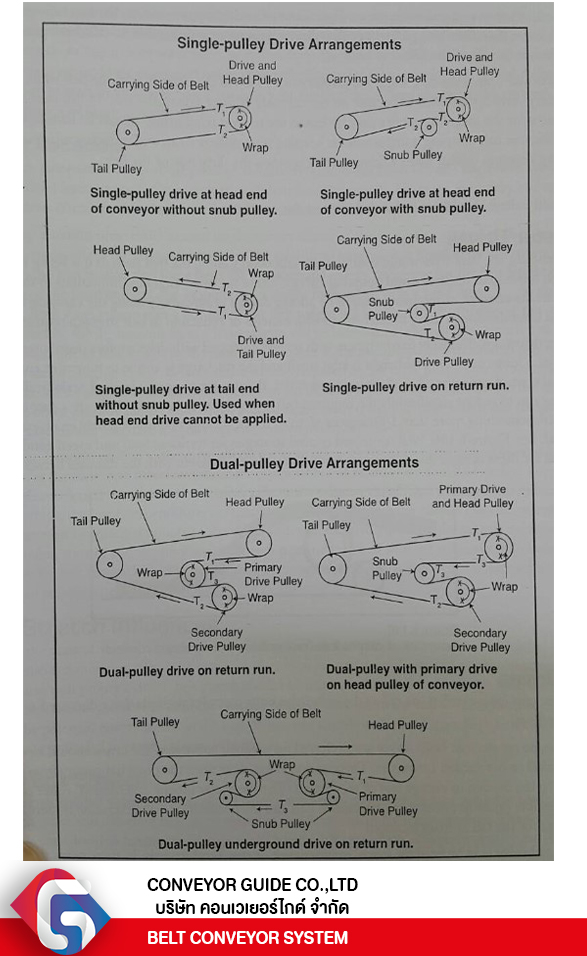
รูปแบบการคล้องสายพาน (Drive Arrangement) (REF: CEMA)
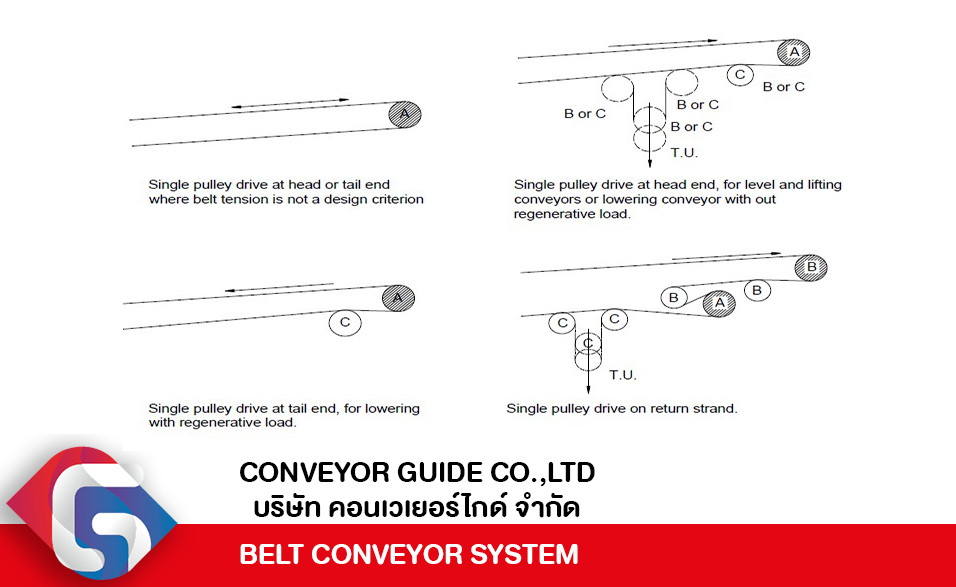

รูปแบบการคล้องสายพาน (Drive Arrangement)
2.Drive System Efficiency ประสิทธิภาพของระบบขับเคลื่อนสายพานลำเลียง
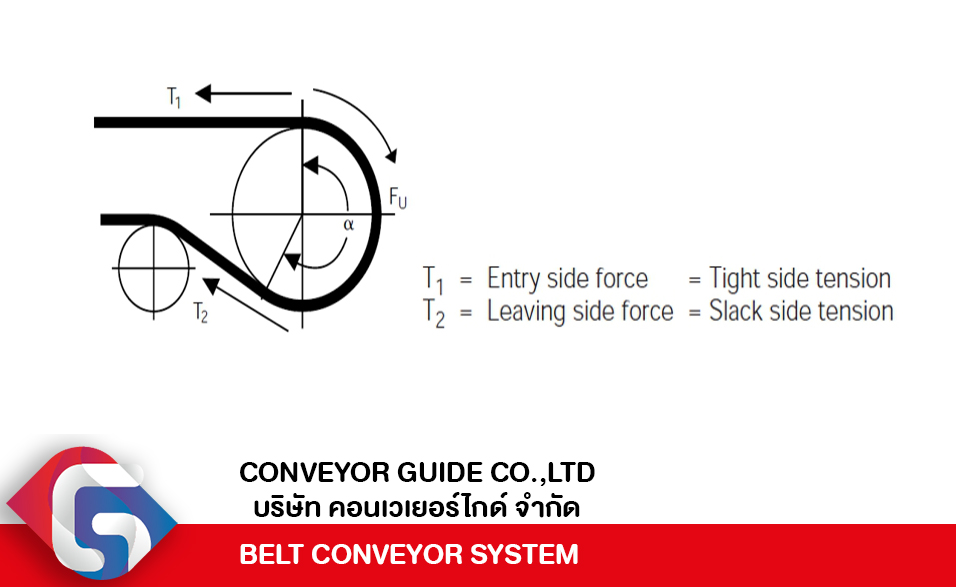
สายพานเคลื่อนที่ได้ เกิดจากแรงเสียดทานระหว่างผิวของสายพานและผิวของมู่เล่(Pulley)ประสิทธิภาพการถ่ายแรง (Power Transmission) จะมากหรือน้อยขึ้นอยู่กับตัวแปร 3 ประการคือ
• T2 ค่า Pre-tension (Slack side Tension) จะต้องเหมาะสม ไม่ตึงและไม่หย่อนมากเกินไป
รูปแบบการคล้องสายพาน (Drive Arrangement)
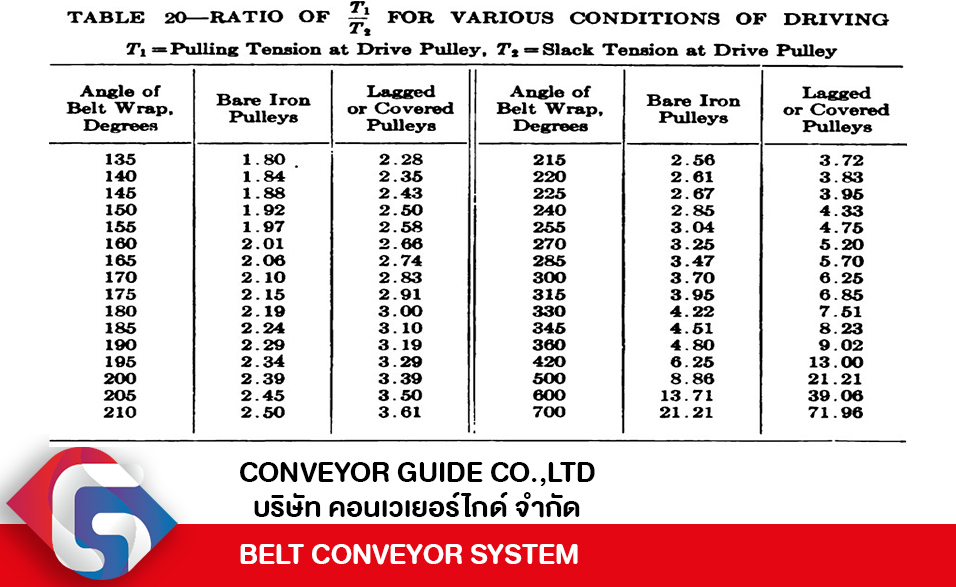
สัดส่วนของ T1 และ T2 REF: Hetzel
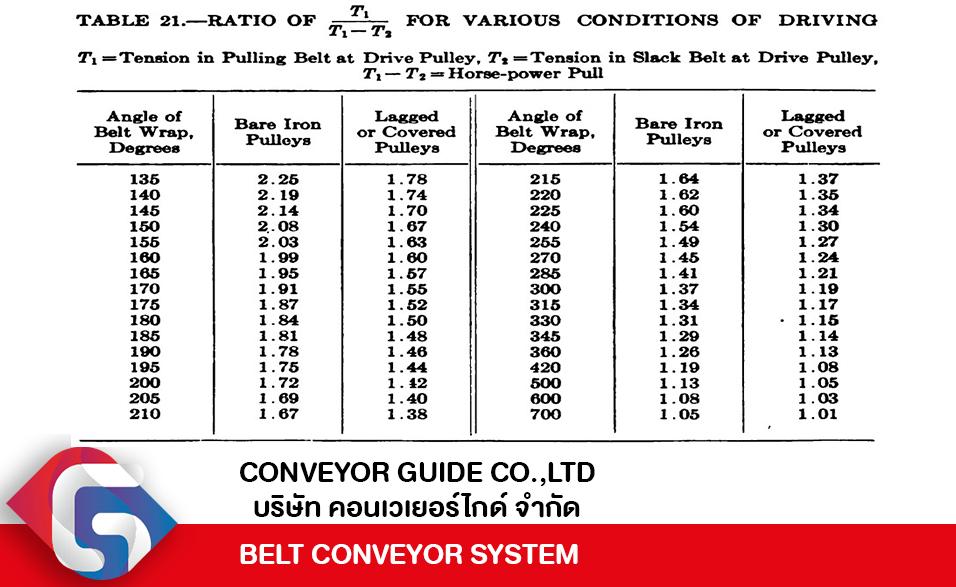
สัดส่วนของ T1 และ (T2-T1) REF: Hetzel
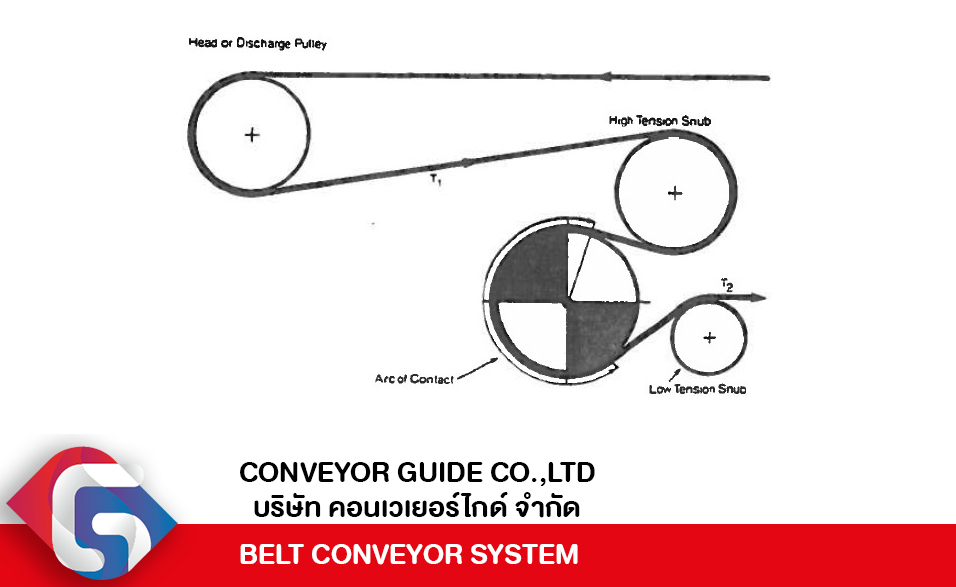
• Art of Contract คือระยะทางที่สายพานโอบมู่เล่(Pulley) ยิ่งระยะโอบมากการส่งถ่ายแรงก็จะมีประสิทธิภาพสูงขึ้น พูดอีกแบบหนึ่งคือการที่สายพานมีมุมโอบ(Wrap Angle-α) มากทำให้สามารถถ่ายแรงได้ประสิทธิภาพสูง
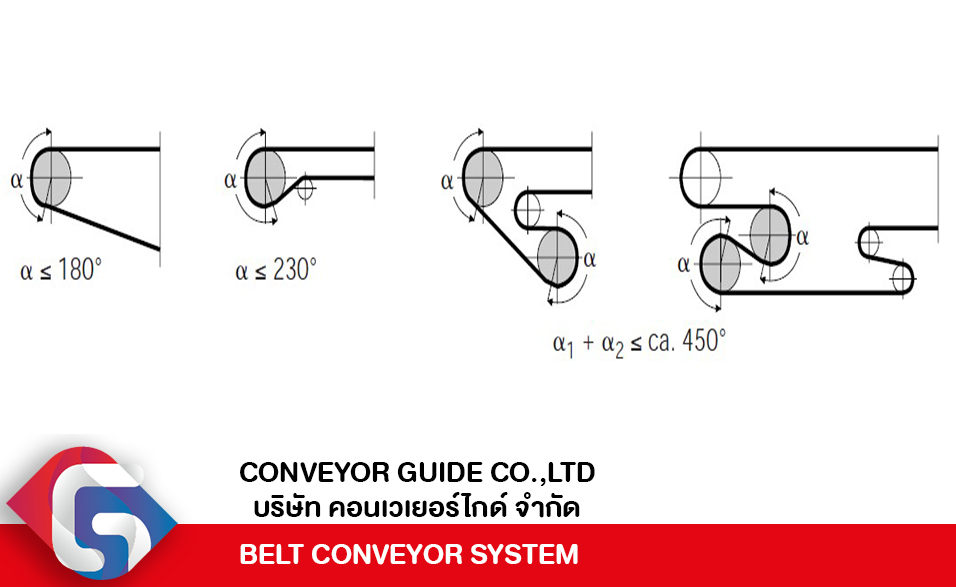
มุมโอบ (Wrap Angle-α) แปรตามรูปแบบการคล้องสายพาน
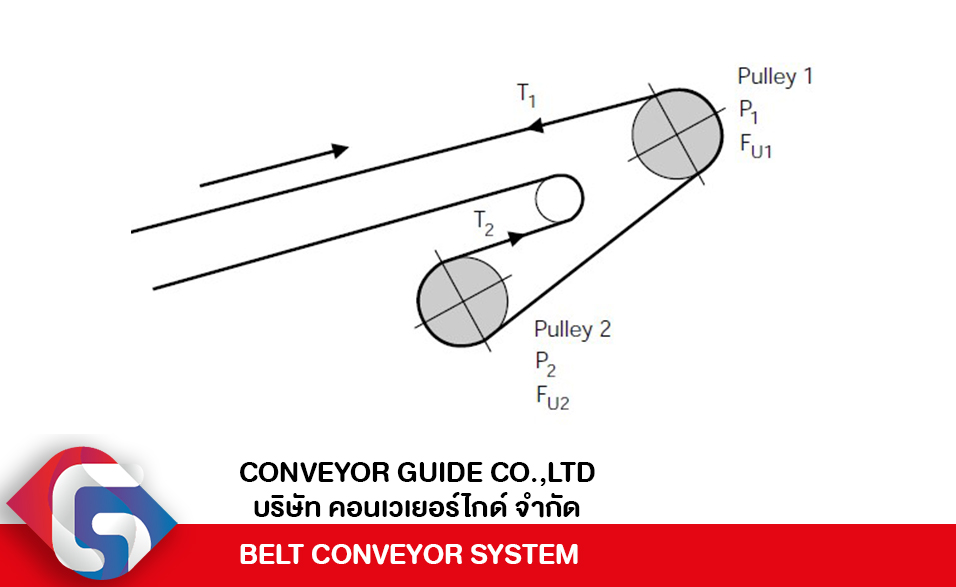
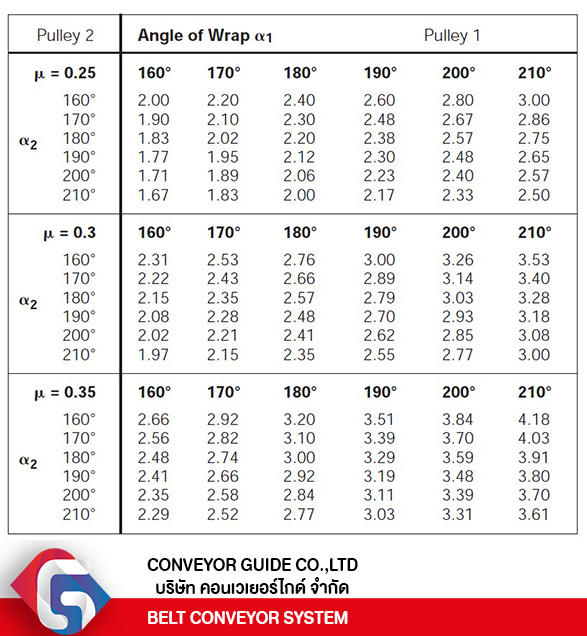
Distribution Value between 2 Pulleys (เมื่อมี Pulley Drive 2 ตัว)
• สัมประสิทธิ์แรงเสียดทาน (Friction Coefficient-µ)ระหว่างผิวมู่เล่(Pulley Surface )และผิวสายพาน ยิ่งมีค่ามากก็ยิ่งมีประสิทธิภาพการถ่ายแรง (Power Transmission) มาก ดังนั้นจึงนิยมหุ้มมู่เล่(Pulley) ด้วยวัสดุต่าง ๆที่มีความฝืดสูงเช่น ยาง(Rubber) หรือ Ceramic เพื่อเพิ่มสัมประสิทธิ์แรงเสียดทาน (Friction Coefficient-µ )

สัมประสิทธิ์แรงเสียดทาน (Friction Coefficient-µ )
3.รูปแบบของระบบมู่เล่ขับสายพาน (Types of Pulley Drive System)
1. ขับด้วยมู่เล่ตัวเดียว (Single Pulley Drive)
• เป็นแบบที่นิยมใช้กันมากที่สุด เรียบง่าย ราคาถูก
• ใช้ในสายพานที่ใช้งานขนาดเบา(Light Duty)ระยะConveyor Length สั้น
• ขับที่หัว(Head drive) หรือที่ท้าย(Tail Drive) ก็ได้
• ใช้ได้ทั้งแนวราบ(Horizontal) และแนวเอียงขึ้น(Incline) ถ้าแนวเอียงลง (Decline) ถ้าเอียงลง1-2 องศา ค่าแรงดึงก็ยังเป็นบวกอยู่(การออกแบบเหมือนปรกติไม่ต้องเป็น Regenerative)
• การกระจายแรง (Load Distribution)ระหว่างมู่เล่และสายพานเป็นไปได้อย่างสม่ำเสมอ
• มีรูปแบบการคล้องสายพานง่ายๆ สายพานพันรอบมู่เล่ประมาณ 180-210 องศา ไม่หักงอหลายรอบ ทำให้อายุการใช้งานของสายพานยาวนาน
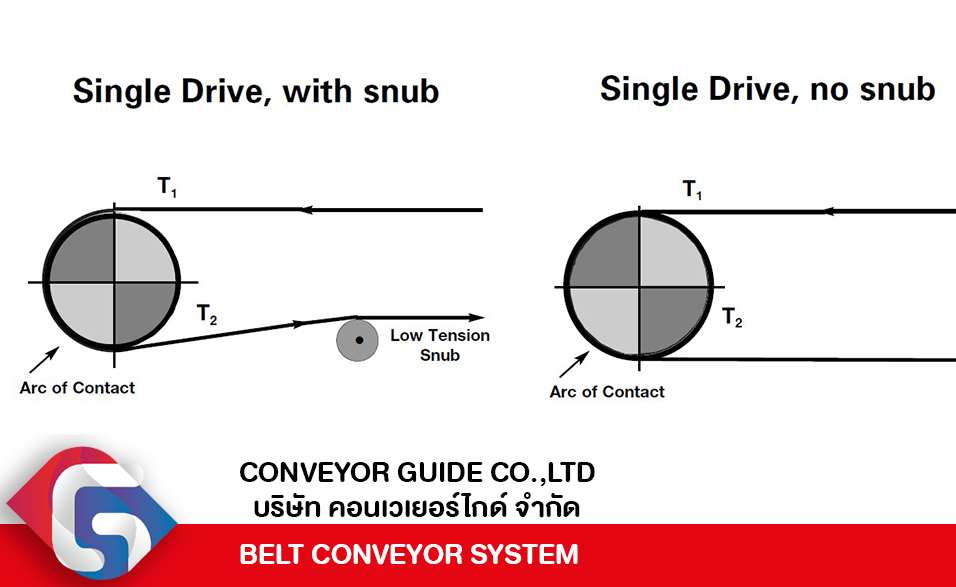
Single Drive Pulley มี Snub และไม่มี Snub Pulley
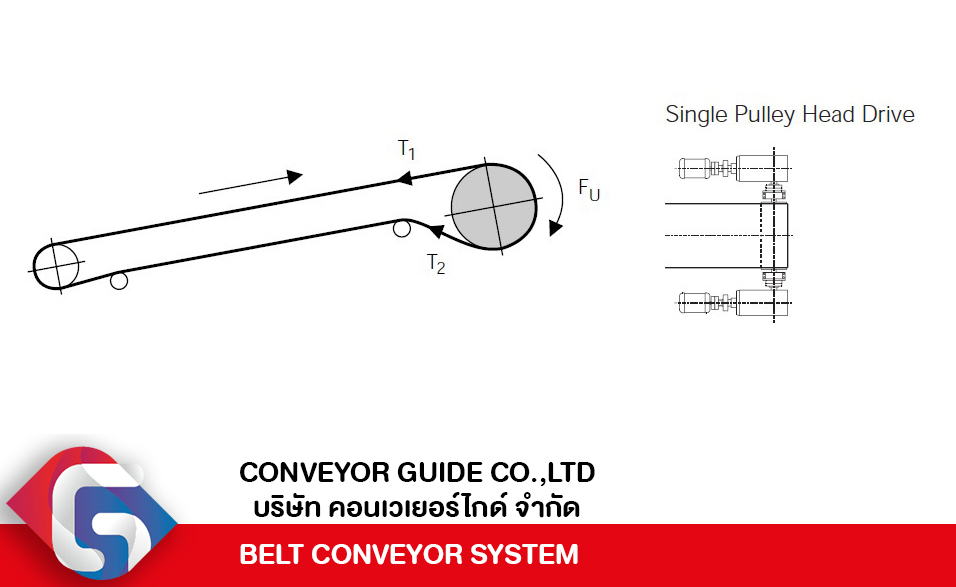
Single Pulley Head Drive (Incline Conveyor)
Single Pulley Tail Drive-Drive Act as Brake (Decline Conveyor)
Single Pulley Drive Behind Head End เพื่อเพิ่มมุมโอบและอำนวยความสะดวกในการวางตำแหน่ง Head Pulley
2. Geared Tandem Drive (Pulley ล้อคู่เพลาเดี่ยว) โดยวางล้อ Pulley Drive สองตัวใกล้ๆกัน ขับโดยมอเตอร์ 1 ตัวใช้เพลา 1 ตัว ไปขับมูเล่ 2 ตัวซึ่งเชื่อมต่อกันด้วยเฟืองเกียร์ที่มีขนาดเท่ากัน
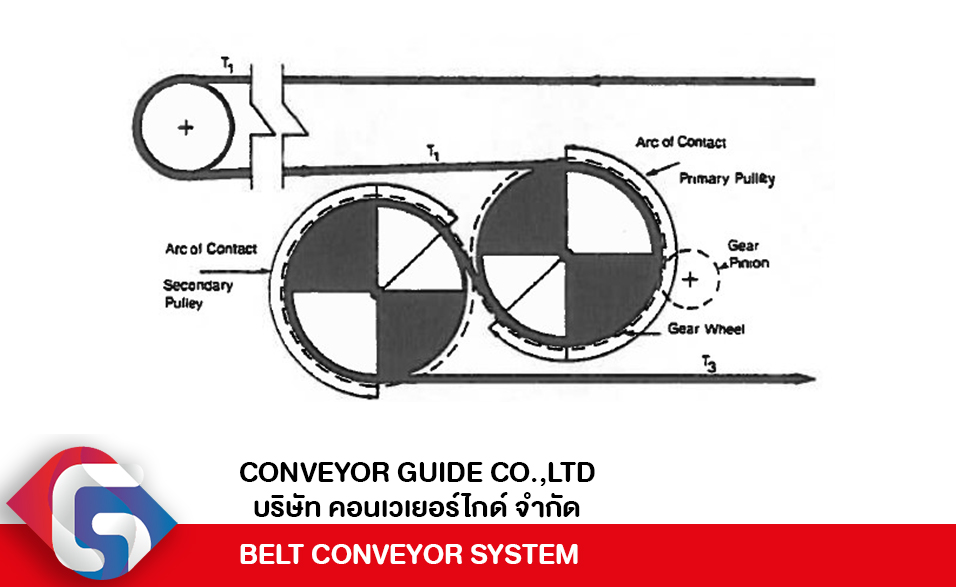
Geared Tandem Drive
2.1 ทำไมต้องเลือก Geared Tandem Drive
• ปัญหา เนื่องจาก Single Pulley Drive มีข้อจำกัดคือแม้ว่าจะใช้ Snub Pulleyหนุนแล้วก็ไม่สามารถมีมุมโอบ (Wrap Angle) เกิน 230 องศา ในสายพานที่มี Capacity สูงที่มี Conveyor Length ยาวมาก เมื่อออกแบบสายพานโดยใช้ Single Pulley Drive จะพบว่าแรงดึงจสูงมากทำให้ต้องใช้สายพานที่มี Strength สูงมีผ้าใบหลายชั้นและได้ขนาดมอเตอร์จะใหญ่มาก ไม่ประหยัด
• แก้ไข ดังนั้นเพื่อลดแรงดึงให้ได้สายพานที่มีสเปคแรงดึง(Strength)น้อยลงและลดขนาดมอเตอร์ให้เล็กลง จึงต้องจัดวางรูปแบบของ Drive System ให้เป็นแบบ Geared Tandem Drive ที่สามารถเพิ่ม Wrap Angle สูงขึ้น (ซึ่งสามารถทำได้ถึง 420-430 องศา) ทำให้ มีประสิทธิภาพการการถ่ายแรง (Power Transmission) สูงขึ้น ขณะเดียวกันก็สามารถใช้ค่าแรงดึงทางด้านหย่อน (Slack Side Tension-T2) ได้น้อยกว่าการใช้ Single Pulley Drive โดยสายพานไม่ลื่น (Slip)
2.2 ข้อจำกัดของ Geared Tandem Drive
• อายุการใช้งานของสายพานในระบบขับเคลื่อนแบบ Geared Tandem Drive นี้จะสั้นกว่าแบบ Single Drive Pulley เนื่องจากขณะทำงานสายพานจะต้องงอโค้ง(Bend) กลับไป-มาหลายครั้ง (ต้องวิ่งผ่าน Pulley หลายลูก) ตามลักษณะการคล้องสายพาน
• สายพานมีโอกาสเกิดการลื่น (Slip)ได้ง่ายเพราะการวาง Drive Pulley 2 ตัวอยู่ใกล้กันทำให้สายพานเกิด Creep เนื่องจากสัดส่วนของ T1 และ T2 สูงมาก (ประมาณ 9:1ถ้าหุ้ม Pulley) มูเล่ตัวที่ 1 (Primary Pulley) จะสัมผัสกับผิวของสายพานด้านบรรทุกวัสดุหรือด้าน Carry Side (ซึ่งจะสกปรก-สายพานจะสึกหรอมาก) ส่วน มูเล่ตัวที่ 2 (Secondary Pulley)จะสัมผัสกับผิวสายพานด้าน Return (ซึ่งสะอาดกว่าและสึกหรอน้อยกว่า) ทำให้สัมประสิทธิ์แรงเสียดทาน (Friction Coefficient-µ ) ระหว่างสายพานและPulley 2 ตัวนี้ไม่เท่ากัน ผลคือแรงดึง(Tension) ทั้งเข้าและออกมูเล่ตัวที่1 (Primary Pulley) จะมากกว่าแรงดึงทั้งเข้าและออกมูเล่ตัวที่ 2 (Secondary Pulley) ทำให้ความเร็วสัมพัทธ์ระหว่าง pulley ทั้งสองลูกไม่เท่ากัน เกิด Creep ดังนั้นจึง Geared Tandem Drive ไม่ควรหุ้ม Pulley (ลด T1/T2) และควรใช้สำหรับกำลังขับมอเตอร์ไม่เกิน 300-360 Kw.
3.ขับด้วยยมูเล่คู่ (Dual Pulley Drive) แยกห่างกัน
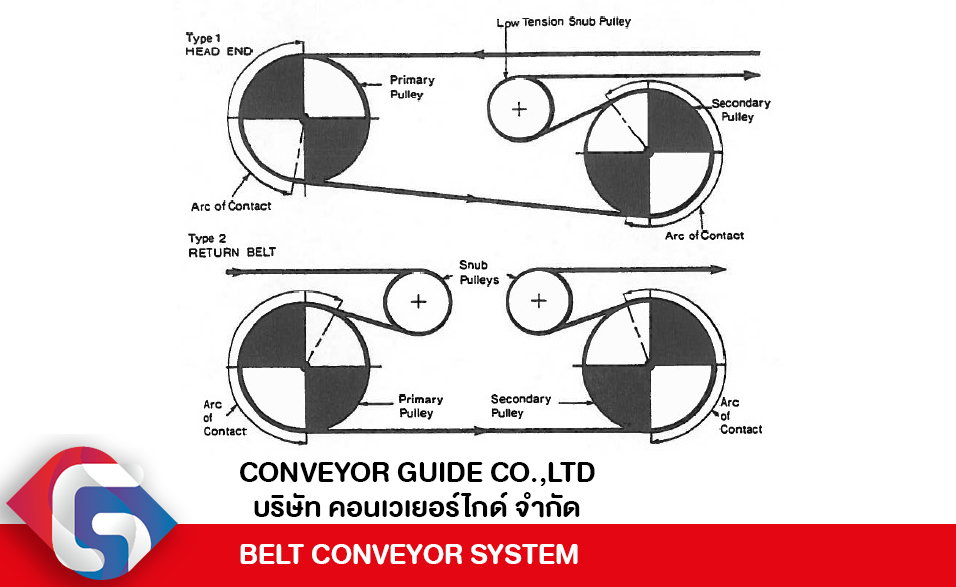
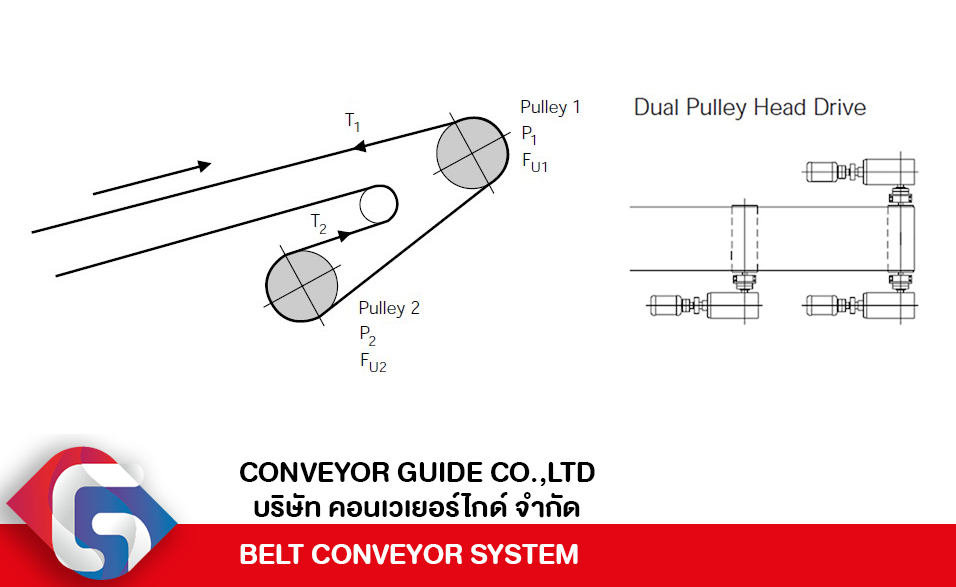
การจัด Drive System แบบล้อคู่เพลาคู่ (Dual Pulley Drive)
เพื่อปิดจุดอ่อนการวางแบบล้อคู่เพลาเดี่ยว (Geared Tandem Drive) ซึ่งต้องวางล้อใกล้กันมากทำให้มีปัญหาเรื่อง Creep ของสายพาน การจัดแบบเพลาคู่ล้อคู่ (Dual Pulley Drive) นี้สามารถจัดวาง Pulley Drives ให้ห่างกันที่ตำแหน่งไหนก็ได้ และ Pulley Drive แต่ละตัวมีต้นกำลังขับมอเตอร์ของตนเองเป็นอิสระ รูปแบบการจัดวางมี 2 แบบ(ดูรูปด้านบน)คือ
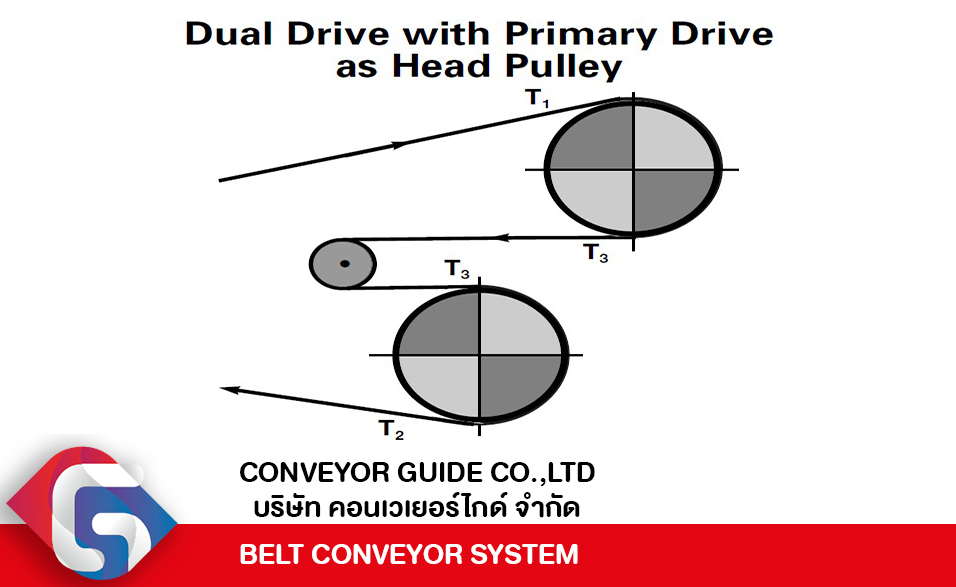
• แบบที่ 1 Drive Pulleys อยู่ใกล้จุดปล่อยวัสดุ (Head End)
• แบบที่ 2 Drive Pulleys วางอยู่ด้าน Return ของสายพาน (การติดตั้งส่วนมากจะวางอยู่บนพื้นดินเพื่อง่ายต่อการบำรุงรักษา ข้อเสียเปรียบของการวางแบบที่ 2 สายพานจะมีอายุการใช้งานน้อยกว่าแบบที่ 1 เนื่องจากสายพานจะดัดงอ(Bend)หลายรอบ
ข้อดี
• 1.การจัด Drive System แบบล้อคู่เพลาคู่ (Dual Pulley Drive) แบบที่ 1 สามารถออกแบบให้สายพานด้าน Return (คือส่วนที่สะอาด) สัมผัสกับ Drive พูเล่ และมีมุมโอบ (Wrap Angle) มากและสามารถเพิ่มเพิ่ม สัมประสิทธิ์แรงเสียดทาน (Friction Coefficient-µ )การหุ้ม (Lagged) Pulley
• 2.การจัด Drive System แบบล้อคู่เพลาคู่ (Dual Pulley Drive)สามารถเลือกมอเตอร์ได้ยืดหยุ่นมากกว่าแบบอื่น ปกติแล้วจะเลือกมอเตอร์แบบ Synchronous Constant Speed หลายลูกแต่ มี Speed Torque Curve เดียวกัน
• 3.ลดการเกิด Creep ได้ เพราะ Drive Pulley วางห่างกันเมื่อสายพานเคลื่อนที่ผ่านมูเล่ตัวที่ 1 (Primary Pulley) มีเวลามากพอที่สามารถคืนตัวสู่สถานะปกติก่อนเข้ามูเล่ตัวที่ 2 (Secondary Pulley)
ข้อเสีย
• สายพานจะมีอายุการใช้งานน้อยเนื่องจากสายพานจะดัดงอ(Bend)หลายรอบ
• ใช้ชิ้นส่วนและอุปกรณ์ในระบบมากกว่าราคาจะสูงกว่า
ข้อแนะนำ ระยะห่างระหว่าง Pulley Drives ทั้ง 2 ตัวควรห่างกันอย่างน้อย 3.5 เมตรหรือจากประสบการณ์พบว่า ให้วางระยะห่างระหว่าง Pulley Drives ทั้ง 2 ตัว เท่ากับระยะที่สายพานวิ่งได้ภาย 1 วินาที เช่นถ้าสายพานมีความเร็ว 4 เมตรต่อวินาที ระยะห่างระหว่างสายพานคือ 4 เมตรเป็นต้น เหตุผลที่จะต้องวาง Pulley Drives ทั้ง 2 ตัวห่างกันเพราะต้องการระยะทางจำนวนหนึ่งที่มากพอเพื่อให้สายพานที่ยืดตัวมากเมื่อออกจาก Drive ตัวแรก (Primary Drive) สามารถหดตัวปรับสภาพสู่ปกติก่อนเข้า Pulley Drives ตัวที่ 2( Secondary Drive) ซึ่งจะลด Creep ของสายพานได้ การจัด Drive System แบบล้อคู่เพลาคู่ (Dual Pulley Drive) เหมาะกับสายพานที่มีกำลังขับมากกว่า 300 กิโลวัตต์ขึ้นไป
4. ขับด้วยยมูเล่หลายตัว (Multi Pulley Drives)
เมื่อเราออกแบบสายพานโดยใช้ Standard Design ตามที่กล่าวมาแล้วพบว่าแรงดึงยังสูงมาก ทำให้ได้ขนาดมอเตอร์จะใหญ่มาก ในสายพานที่มี capacity สูงหรือมีความยาวมากแม้ว่าDrive Arrange แบบ Geared Tandem Drive ก็มีปัญหาการ slip ทางเลือกสุดท้ายคือระบบขับแบบใช้มอเตอร์หลายตัวซึ่งสามารถลด Maximum Tension ลงได้อย่างมากอีกทั้ง Tension ด้าน Return ก็สามารถติดตั้งมอเตอร์ขับที่ตำแหน่งTail หรือใกล้Tailได้ รายละเอียดผู้อ่านศึกษาเพิ่มเติมเองนะ
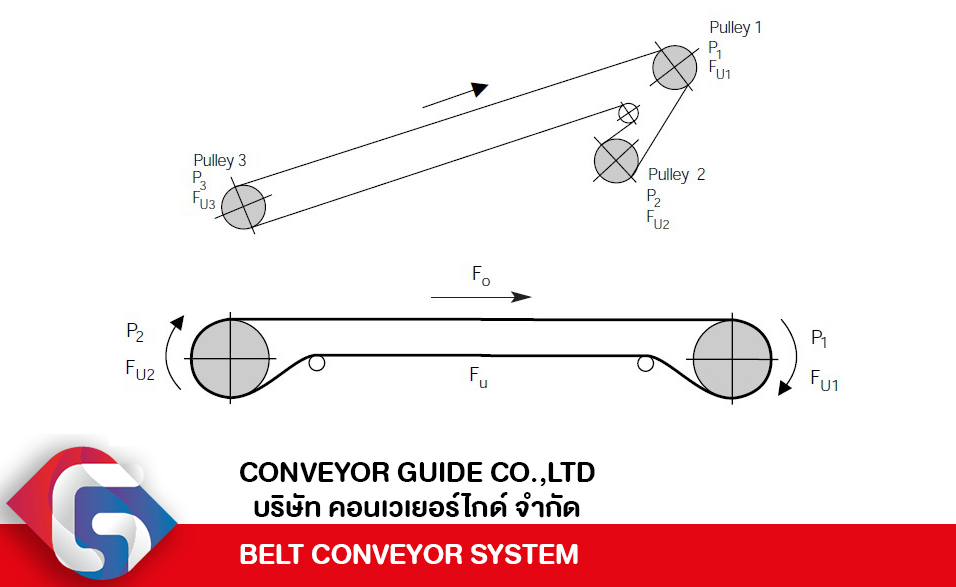
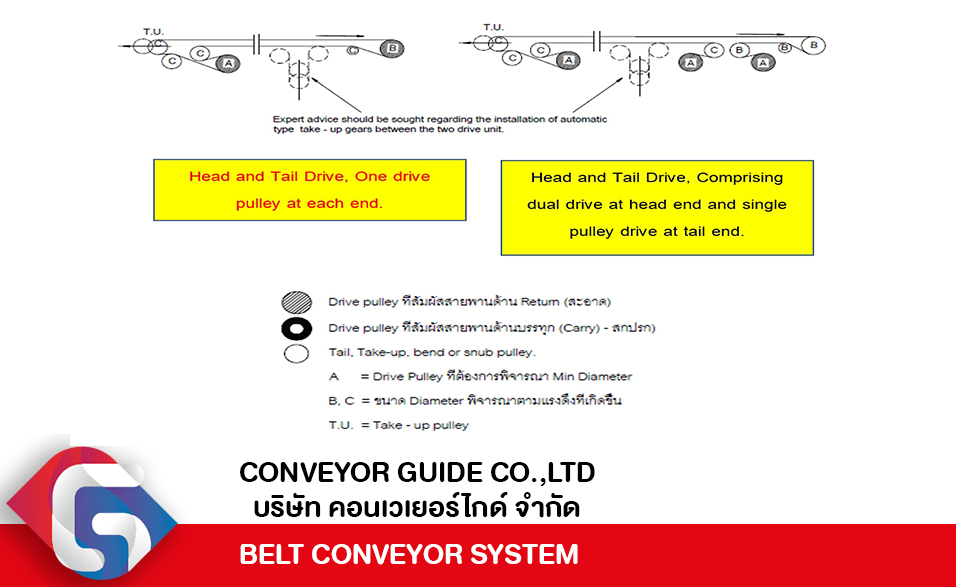
ขับด้วยยมูเล่ 2 ตัวทั้งที่หัวและที่ท้าย (Head and Tail Pulley Drive)
4.สรุปประเด็นของบทความนี้
ประเด็นของบทความนี้คือการเลือก Drive Arrangement ให้เหมาะสมกับค่าใช้จ่ายในการลงทุนสำหรับคอนเวเยอร์ที่มีความยาว(Conveyor Length)และภาระบรรทุก(Load)แตกต่างกัน
• ถ้าเป็นสายพานทั่วไปที่ภาระบรรทุกและความยาว(Conveyor Length)ไม่มาก การใช้ Single Drive Pulley ในการออกแบบจะได้แรงดึง ขนาดมอเตอร์และราคาโดยรวมของระบบที่เหมาะสม เพราะมีอุปกรณ์น้อย สายพานที่สเปคใม่ Over มอเตอร์ที่มีมาตรฐานใช้ทั่วไปราคาถูกา
• แต่ถ้าเป็นสายพานที่มีภาระบรรทุกมาก (Heavy Load)และมีระยะทางที่ยาวมาก (Very Long Conveyor Length)การใช้ Single Drive Pulley ในการออกแบบจะทำให้ได้ค่าแรงดึงสูงมาก ซึ่งส่งผลไปถึงต้องใช้สายพานที่มี Strength สูงมาก ใช้มอเตอร์ที่มีขนาดใหญ่มาก เป็นการไม่ประหยัด การเพิ่มมุมโอบของ Single Drive Pulley ก็ได้ไม่เกิน 230 องศาเท่านั้น ดังนั้นจึงต้องเลือกใช้ Drive Arrangement อย่างอื่น เช่น Geared Tandem Drive, Dual Pulley Drive หรือ Multi Pulley Drives ซึ่งมีมุมโอบได้มากขึ้น ทำให้ค่าแรงดึงที่คำนวณมาได้น้อยลง กำลังมอเตอร์ก็จะน้อยลง ทั้งนี้ก็ต้องพิจารณาด้วยว่าราคาโดยรวมของระบบคอนเวเยอร์จะเป็นยังไงเมื่อเปรียบเทียบกับ Single Drive Pulley เพราะการจัด Drive Arrangement แบบหลายลูกดังกล่าวนี้จะมีอุปกรณ์อย่างอื่นเพิ่มขึ้น
• อีกประเด็นหนึ่งที่จะอธิบายให้เข้าใจได้ง่ายๆว่าทำไมเมื่อมุมโอบเพิ่มขึ้น จึงสามารถเพิ่มประสิทธิภาพของการถ่ายแรง(Power Transmission)ได้มากขึ้น ยกตัวอย่างเช่น ในการเทียบท่าของเรือขนาดใหญ่คนตัวเล็ก ๆคนเดียวที่เอาเชือกมาพันรอบหมุดที่อยู่บนท่าเรือหลายๆรอบ(เพิ่มมุมโอบให้มาก) สามารถหยุดเรือที่มีน้ำหนักหลายตันได้สบาย โดยใช้แรงประคองปลายเชือก(T2 = Slack side tension)เพียงนิดเดียวก็จะสามารถ Maintain แรงดึง (T1 = Tight side tension) ซึ่งมีค่ามากมายมหาศาลจนสามารถฉุดตัวเรือให้หยุดได้ ยิ่งพันเชือกรอบหมุดหลายรอบแค่ไหนก็ใช้แรง T2 ในการประคองปลายเชือกน้อยลงเท่านั้นโดยที่สายพานไม่ลื่น(Slip)
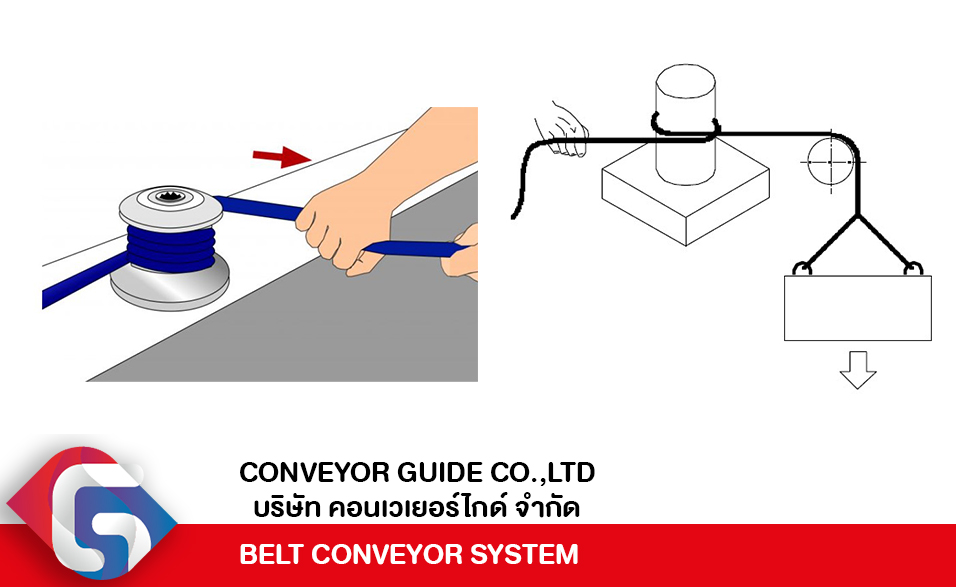
มุมโอบเพิ่มขึ้น(พันเชือกหลายรอบ)สามารถเพิ่มประสิทธิภาพของการถ่ายแรง(Power Transmission)ได้มากขึ้น