9.การเลือกมอเตอร์สำหรับสายพานลำเลียง

คอนเวเยอร์ไกด์ไปดูหน้างานนำประสบการณ์ดีๆมาแบ่งปัน Conveyor ลำเลียงกากอ้อยจากกองเก็บเข้าเตาเผา (ภาพ โรงไฟฟ้า Bagasse )
1.ภาพรวมประเภทของมอเตอร์
แม้ว่าตั้งแต่เกิดลืมตาขึ้นมาเราจะคุ้นเคยกับมอเตอร์ซึ่งเป็นเครื่องใช้ในเครื่องใช้ไฟฟ้าประจำวันของเราเช่น สว่าน ตู้เย็น เครื่องปั๊มน้ำ พัดลมแล้ว แต่พอเราจะมาเลือกมอเตอร์ซึ่งใช้ในการขับเคลื่อนสายพานลำเลียง คงจะยังไม่รู้ว่าจะเลือกรุ่นไหนแบบไหนดีหรือจะเริ่มต้นยังไง ดังนั้นผู้เขียนก็เลยพยายามที่จะทำเป็นรูปภาพที่จะอธิบายภาพรวมของมอเตอร์ให้ผู้อ่านได้เข้าใจไปพร้อม ๆกันดังนี้
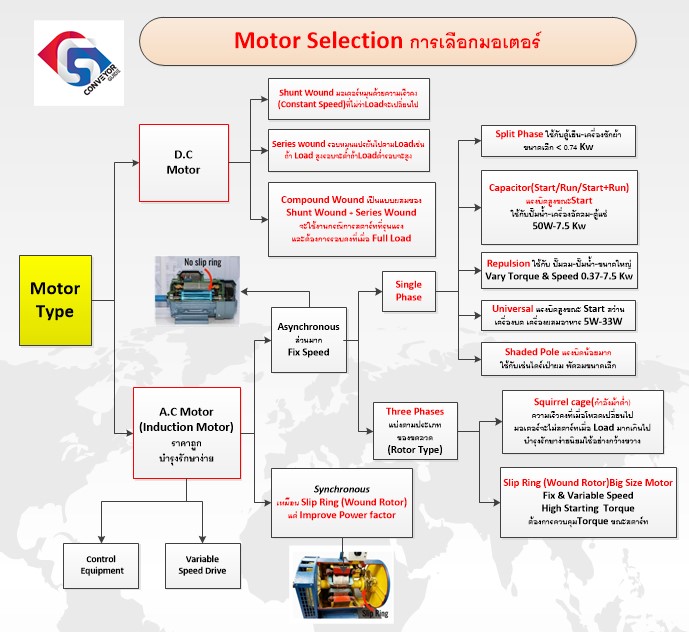
ภาพรวมมอเตอร์ประเภทต่าง ๆ
แนวทางการเลือก Drive System สำหรับขับสายพาน
• 1.Geared Motor เกียร์มอเตอร์ที่สร้างรวมกับgear เป็น Unit เดียวกัน ใช้สำหรับงานเบาๆที่มีกำลังขับประมาณไม่เกิน 30 กิโลวัตต์ มีขนาดกะทัดรัดสามารถใช้ Fixed coupling หรือ Flexible coupling ต่อมายังเพลาขับได้
• 2. Motor gears Coupling มอเตอร์เกียร์คัปปลิ้งประกอบด้วยอุปกรณ์ 3 อย่างคือ มอเตอร์ เกียร์และ Coupling ข้อดีของการใช้วิธีการติดตั้งแบบนี้คืออุปกรณ์มีมากมายหลายอย่างให้เลือกใช้อย่างแพร่หลาย ง่ายต่อการเก็บรักษาและซ่อมบำรุง ใช้กับมอเตอร์ที่มีขนาด 600 ถึง 1,500 กิโลวัตต์ นอกจากนี้ในกรณีที่มอเตอร์ขนาดใหญ่มากสามารถ ติดตั้ง คัปปิ้ง(Coupling) เบรค(Brake) อยู่ใน Unit เดียวกับ Drive Unit ได้
• 3.Pulley Motor เป็นDrive Pulley มี่มีมอเตอร์อยู่ภายในตัวพูเล่ ใช้สำหรับมอเตอร์ที่มีกำลังขับ 20 กิโลวัตต์ถึง 100 กิโลวัตต์ ไดมิเตอร์สูงสุด 1,400 มิลลิเมตรและใช้กับสายพานที่มีความเร็วไม่เกิน 5 เมตรต่อวินาที
แนวทางการเลือกประเภทมอเตอร์สำหรับขับสายพาน
• Squirrel Cage Motor เป็นมอเตอร์ที่นิยมใช้กันได้อย่างแพร่หลาย เพราะมีโครงสร้างที่ง่าย ทนทาน แข็งแรงและราคาถูกนอกจากนี้ยังสามารถปรับและลด Torque ขณะที่สตาร์ทได้โดยใช้ Flexible Coupling, Fluid Coupling หรือ Slip Coupling ส่วน Stress ที่เกินที่เกิดขณะสตาร์ทก็สามารถจำกัด(Limit)ได้ด้วยการเพิ่มความต้านทานโดยการต่อวงจรไฟฟ้าแบบสตาร์เดลต้า(Star-Delta)
• Slip Ring Moto ติดตั้งในมอเตอร์ขนาดใหญ่ สามารถลด Strating Torque โดยการเพิ่มความต้านทานภายในวงจรไฟฟ้า
2.Drive System ระบบขับเคลื่อนสายพานลำเลียง
ก่อนที่จะไปเลือกมอเตอร์อย่างละเอียด เราต้องเข้าใจก่อนว่ามอเตอร์ไม่สามารถฉุดสายพานให้เคลื่อนที่ได้ด้วยตัวของมันเองโดยลำพัง หน้าที่ของมอเตอร์คือเป็นต้นกำลังที่จะสร้างแรงบิด(Torque) ให้พูเล่ (Pulley) ไปฉุดสายพานให้เคลื่อนที่ จากมอเตอร์ถึงพูเล่ต้องประกอบด้วยอุปกรณ์ส่งกำลังหลายส่วน รวม ๆ กันเรียกว่าระบบขับเคลื่อน(Drive System) เช่น เกียร์ Coupling , Hold back and Brake นำมาต่อเชื่อมกันให้ถึงเพลาขับ (Drive Shaft) เพื่อขับให้สายพานหมุนได้
เนื่องจากมอเตอร์มีรอบ (rpm) การทำงานที่สูงมากขณะที่รอบ(rpm) การทำงานของสายพานลำเลียงจะมีต่ำกว่า ดังนั้นจำเป็นจะต้องมีตัวช่วยใช้ Gear Reducer เพื่อลดรอบ(rpm) ของมอเตอร์ให้ต่ำลง ให้เหมาะสมที่ใช้กับรอบหมุนของสายพานลำเลียง และต้องมีอุปกรณ์ที่ช่วยในการส่งกำลัง (Transmission Devices) จากเกียร์ ไปถึงเพลาขับพูเล่ได้อย่างนุ่มนวล นอกจากนี้ยังต้องติดตั้งอุปกรณ์เพื่อความปลอดภัยด้วยเช่น ถ้า Profile ของสายพานแนวเอียงขึ้น(Incline) ต้องติดตั้ง Holdback หรือ Back Stop เพื่อป้องกันไม่ให้สายพานลำเลียงไหลลงในกรณีที่เกิดไฟฟ้าดับหรืออุบัติเหตุทำให้สายพานหยุดโดยกะทันหัน หรือในกรณีที่โปรไฟล์ของคอนเวเยอร์เป็นแบบเอียงลง(Decline) จำเป็นจะต้องติดระบบชะลอการเคลื่อนที่หรือ Brake เพื่อให้สายพานสามารถเคลื่อนที่ได้ด้วยความเร็วเหมาะสมไม่เกิดอันตรายเป็นต้น
3.ปัจจัยในการพิจารณาเลือกมอเตอร์
แนวทางการเลือก Drive System สำหรับขับสายพาน
1.ลักษณะการสตาร์ทของระบบสายพานลำเลียง(สำคัญที่สุด)
2.Voltage ของ Power Supply
3.มีความเร็วคงที่หรือปรับความเร็วได้
4.สิ่งแวดล้อมของระบบสายพานลำเลียง
5.ลักษณะโปรไฟล์ของสายพานลำเลียงว่าอยู่ในแนวราบ(Horizontal) แนวเอียงขึ้น(Incline)หรือเอียงลง(Decline) หรือมีทั้งเอียงขึ้น(Incline) และ เอียงลง(Decline) อยู่ภายในไลน์เดียวกันเช่น Overland Conveyor
4.ลักษณะการเริ่มสตาร์ทและสิ่งแวดล้อม
มอเตอร์ที่ใช้กับสายพานลำเลียงต้องทำงานภายใต้การรับภาระโหลด(Load)ที่หลากหลายเงื่อนไข(Variable Conditions)เช่น สูงบ้าง-ต่ำ บ้างและจะต้องวิ่งด้วยความเร็วสม่ำเสมออีกด้วย ดังนั้นการเลือกมอเตอร์จึงต้องพิจารณาปัจจัยแห่งความหลายหลากของโหลด(Load)นี้ในการพิจารณาด้วย
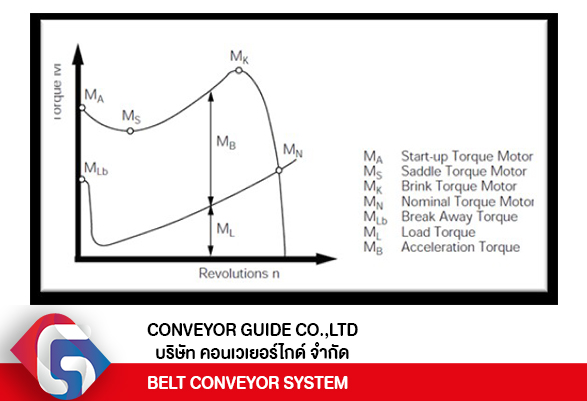
ในช่วงที่มอเตอร์เริ่มหมุนด้วยการสตาร์ทแบบ DOL จะเกิดแรงบิดสูงมากถึง 1.5 ถึง 3 เท่าของแรงบิดปกติ ซึ่งทำให้เกิดแรงบิดส่วนเกินที่ไม่ได้ใช้งาน ทำให้อุปกรณ์หรือที่สายพานเกิด Stress สูงกว่าปรกติ หากแรงส่วนเกินนี้มากกว่า Ultimate Strength ของสายพานทำให้สายพานขาดได้ แต่เมื่อความเร็วรอบสูงขึ้นจนถึงความเร็วสูงสุด แรงบิดของมอเตอร์จะน้อยลงกลับเข้าสู่ค่าปกติเรียกว่าสภาวะ Steady State ดังนั้นการทราบลักษณะของการสตาร์ทมอเตอร์จึงเป็นเรื่องสำคัญในการเลือกขาดและชนิดของมอเตอร์
Squirrel Motor with Hydraulic Coupling
Squirrel Motor with Fixed Coupling
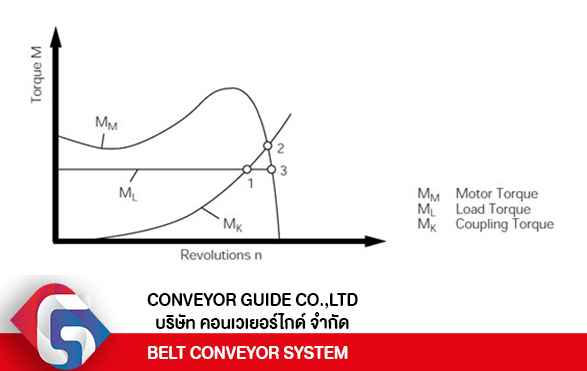
แรงดึง(Belt Tension)ในสายพานจะไม่คงที่ในขณะสตาร์ทคอนเวเยอร์ กล่าวคือเมื่อเริ่มสตาร์ทสายพานส่วนที่อยู่ใกล้ Drive Pulley จะเริ่มเคลื่อนที่ก่อน (สายพานจะตึงหรือมี Tension สูง ณ.ตำแหน่งใกล้ Drive Pulley ก่อน-ต้องการใช้ Torque มาก) แล้วจะค่อยๆส่งแรงไปยังสายพานส่วนที่อยู่ถัดไปให้เคลื่อนที่ แสดงให้เห็นว่าแรงดึงในสายพานจะไม่เท่ากันในช่วงเวลาระหว่าง Start จนถึงสายพานวิ่งด้วย Full Load จากประสบการณ์พบว่า มอเตอร์พื้นฐานทั่วไป (Basic Squirrel Motor) ต้องการระยะเวลาเร่ง Acceleration Time ประมาณไม่เกิน 6 วินาทีจะถึง Normal Running Speed (สายพานวิ่งด้วย Full Load) ถ้าใช้เวลาเกินไปกว่านี้อาจจะเกิดความผิดปรกติ ให้เช็ค Thermal Capacity ของมอเตอร์หรือติดต่อผู้ผลิตมอเตอร์
คุณสมบัติของมอเตอร์ที่เหมาะสมกับระบบสายพานลำเลียงต้องการคือ มีแรงบิด(Torque) เกือบคงที่ตลอดเวลาในระหว่าง Full Acceleration Period แต่เมื่อเริ่ม Start คอนเวเยอร์แรงบิด (Torque) จะไม่คงที่แต่จะแปรผันตามแรงดึง(Belt Tension) จากประสบการณ์พบว่าการสตาร์ทจะไม่มีปัญหาเมื่อ มอเตอร์มีกำลังน้อยกว่า 60 กิโลวัตต์ ถ้ามอเตอร์ที่ใช้มีกำลังสูงกว่า 60 กิโลวัตต์ต้องมีตัวช่วย (Soft Start) เพื่อควบคุมการ start ให้เป็นไปได้อย่างนุ่มนวล เช่นติดตั้ง Fluid Coupling หรืออุปกรณ์อย่างอื่น เพื่อให้เหมาะสมกับลักษณะของ Speed-Torque ที่เกิดขึ้นจริงในระบบขณะทำงาน
หากมอเตอร์ขนาดใหญ่ติดตั้งในพื้นที่สูงกว่าระดับน้ำทะเลมาก อากาศจะเบาบางทำให้การระบายความร้อนของมอเตอร์ไม่ดี ดังนั้นจะต้องนำปัจจัยนี้มาพิจารณาในการเลือกมอเตอร์ด้วย อย่างไรก็ตามจากประสบการณ์พบว่า Squirrel Motor Standard สามารถทำงานได้ดีแม้ว่าจะติดตั้งอยู่ในที่สูงถึง 1000 เมตรเหนือนระดับน้ำทะเล
5.การเลือกมอเตอร์ขั้นสุดท้าย
การหากำลังมอเตอร์เพื่อขับสายพานลำเลียงจะต้องคำนึงถึงประสิทธิภาพการส่งกำลัง(Drive Efficiency) โดยรวมของอุปกรณ์เชื่อมต่อต่างๆจากมอเตอร์ถึงเพลาขับ (Drive Shaft) โดยเอาประสิทธิภาพการส่งกำลัง(Drive Efficiency)ของอุปกรณ์ต่างๆทุกตัวหารกำลังมอเตอร์ที่คำนวณได้ก็จะได้เป็นคำตอบ
ยกตัวอย่างเช่นถ้ากำลังมอเตอร์ที่คำนวณได้เท่ากับ 45 กิโลวัตต์เราเลือกใช้ Gear Reducer แบบ Double helical ซึ่งมีประสิทธิภาพการส่งกำลัง(Drive Efficiency) เท่ากับ 0.97 เอามาต่อกับโซ่ซึ่งเป็น Open gard, Roller chain and Cut Sprockets ประสิทธิภาพการส่งกำลัง (Drive Efficiency) = 0.93 ดังนั้นมอเตอร์ที่ต้องการคือ 45 หารด้วย (0.97 x 0.93) = 49.88 กิโลวัตต์ จากนั้นก็เลือก Standard Motor คือ 55 กิโลวัตต์
ตาราง CEMA ข้างล่างนี้เป็นค่าที่ Conservative เผื่อไว้สำหรับความผิดพลาดต่างๆ เช่น การเชื่อมต่อที่ไม่ได้แนว (Misalignment) ของคัปปลิ้ง(Clupling) การการบำรุงรักษาที่ไม่ได้มาตรฐานหรือผลกระทบจากการเปลี่ยนแปลงของอุณหภูมิก็เผื่อไว้แล้วเช่นกัน
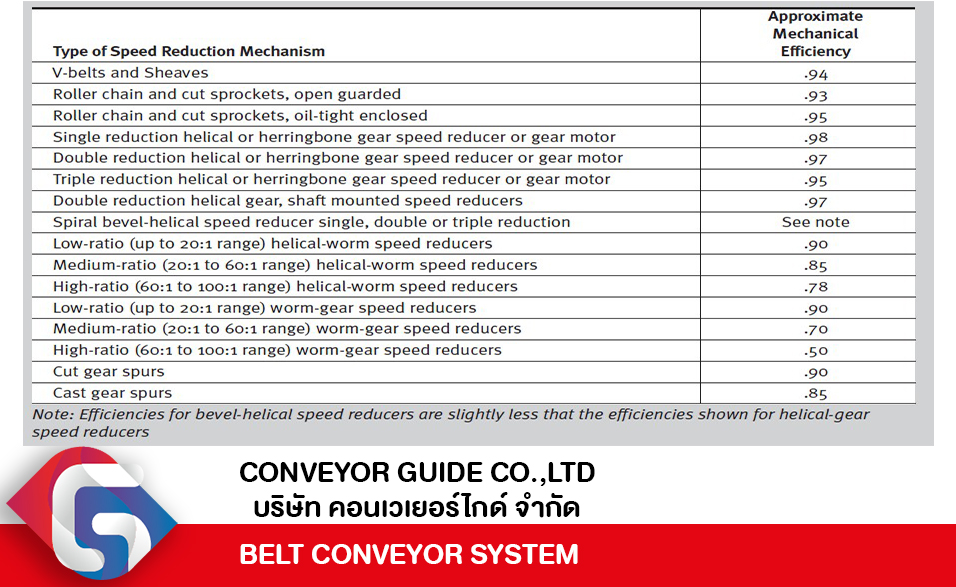
Mechanical Drive Efficiency of various reduction Mechanism (Ref: CEMA)
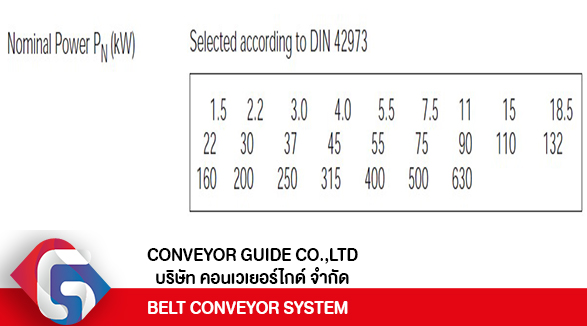
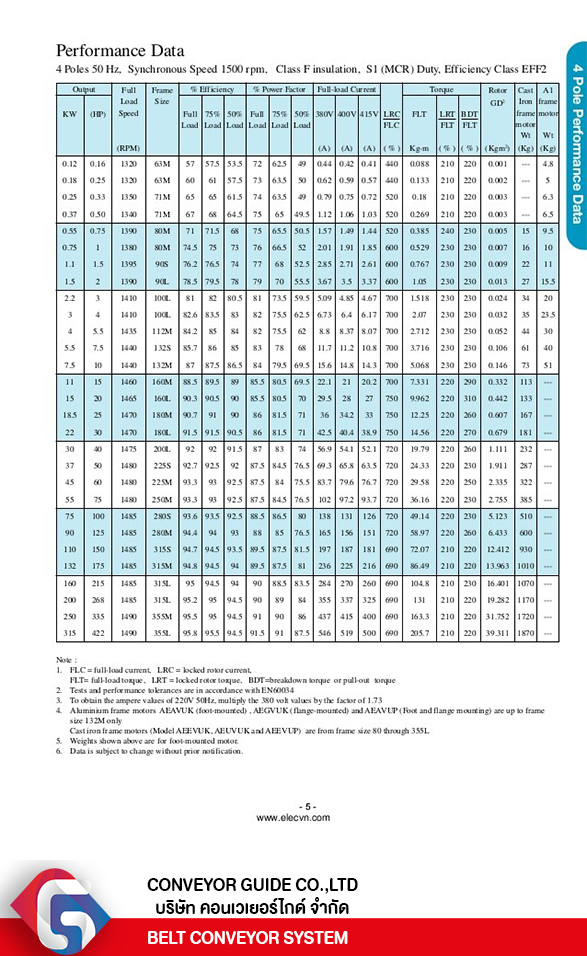
Standard Motor Power (DIN 42973)
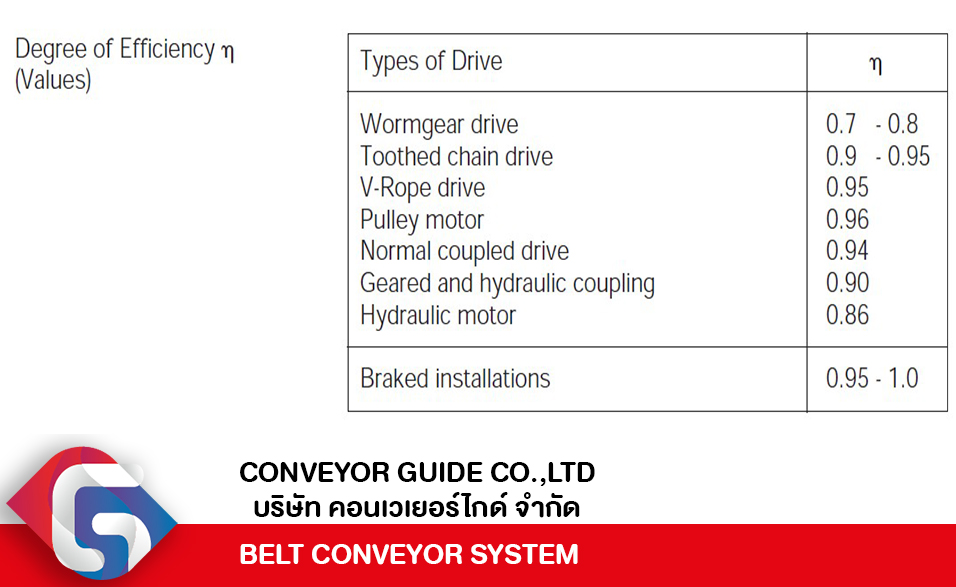
Mechanical Drive Efficiency of various reduction Mechanism (Ref: Dunlop)
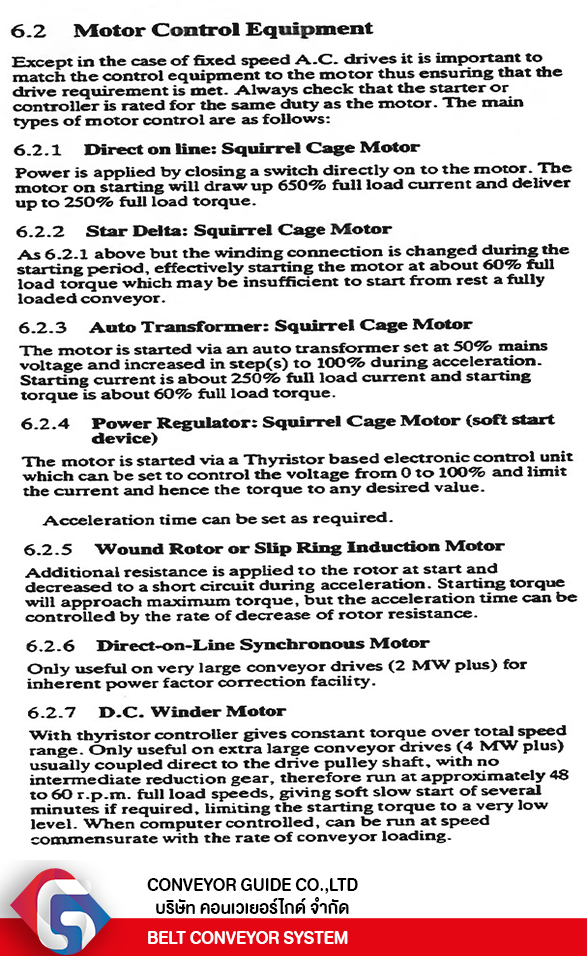
6.Motor Control Equipment
7.Variable Speed Drives